|
dsPid33
|
|
dsPid33
|

Go to the source code of this file.
Functions | |
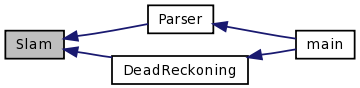
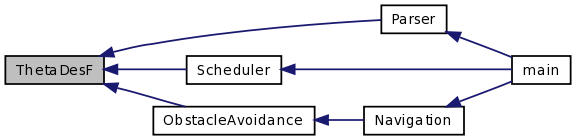
| int | main (void) |
| void | SendMap (void) |
| void | ThetaDesF (float Angle) |
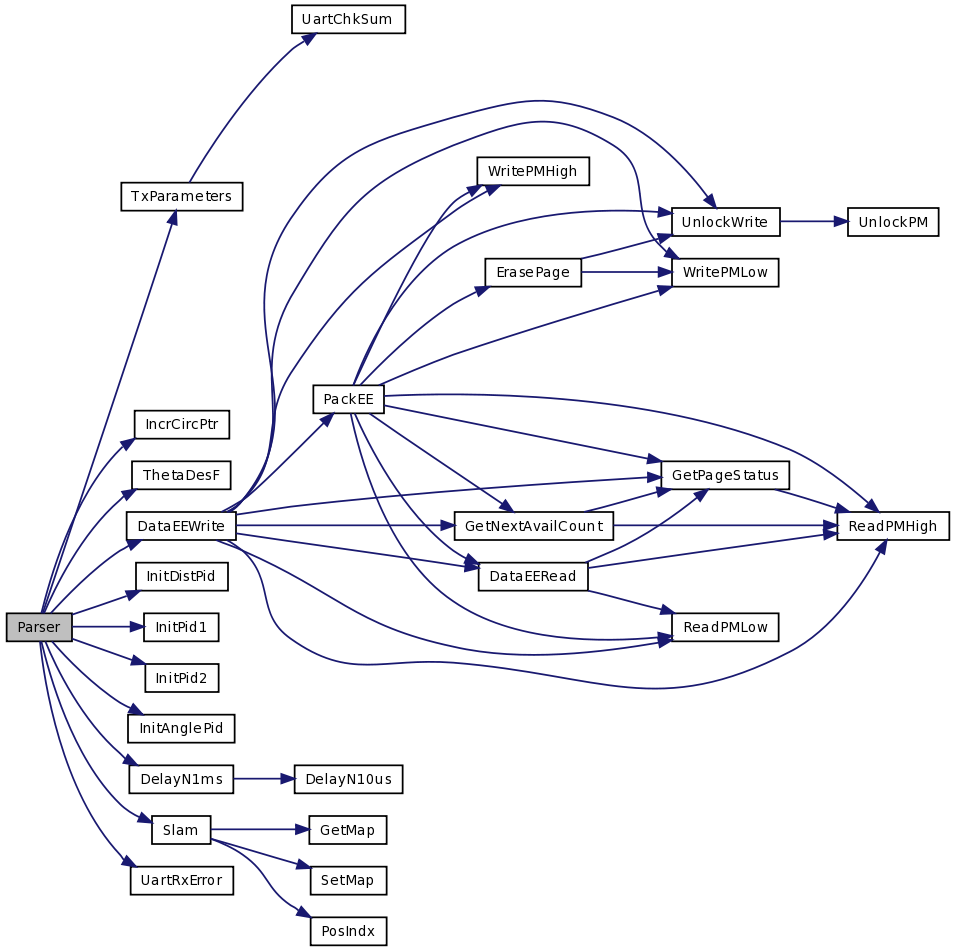
| void | Parser (void) |
| void | Scheduler (void) |
| void | AdcCalc (void) |
| void | InitDistPid (void) |
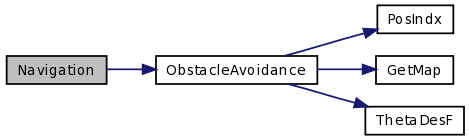
| void | Navigation (void) |
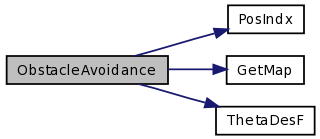
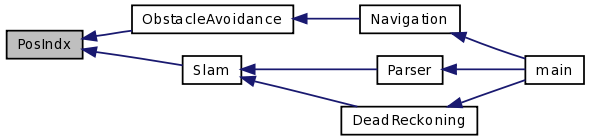
| float | ObstacleAvoidance (float DPosX, float DPosY, int DistTarget) |
| void | InitAnglePid (void) |
| void | Orientation (void) |
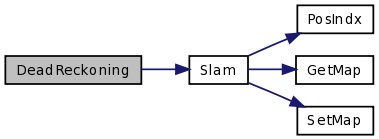
| void | DeadReckoning (void) |
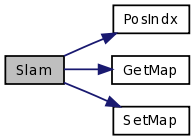
| unsigned char | Slam (float PosX, float PosY, int Cell) |
| int | PosIndx (float Pos) |
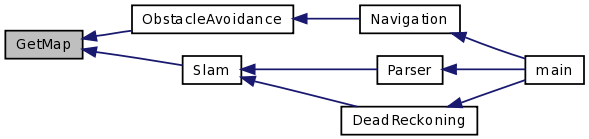
| unsigned char | GetMap (int Xpnt, int Ypnt) |
| void | SetMap (int Xpnt, int Ypnt, nibble *CellVal) |
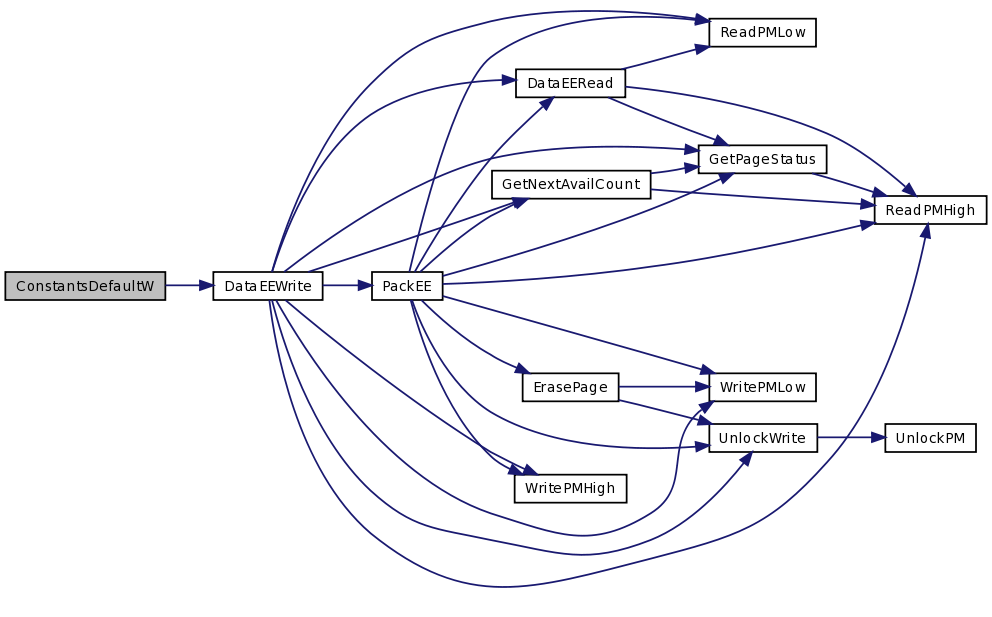
| void | ConstantsDefaultW (void) |
| void | ConstantsDefaultR (void) |
| void | ConstantsError (void) |
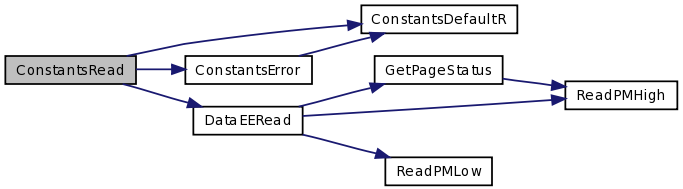
| void | ConstantsRead (void) |
| void | InitPid1 (void) |
| void | InitPid2 (void) |
| void | Pid1 (void) |
| void | Pid1Calc (void) |
| void | Pid2 (void) |
| void | Pid2Calc (void) |
| void | DelayN1ms (int n) |
| void | DelayN10us (int n) |
| void | TxCont (void) |
| void _ISR_PSV | _T1Interrupt (void) |
| void _ISR_PSV | _T2Interrupt (void) |
| void _ISR_PSV | _DMA7Interrupt (void) |
| void _ISR_PSV | _DMA6Interrupt (void) |
| void _ISR_PSV | _DMA5Interrupt (void) |
| void _ISR_PSV | _IC1Interrupt (void) |
| void _ISR_PSV | _IC2Interrupt (void) |
| void | __attribute__ ((interrupt, no_auto_psv)) |
Variables | |
| unsigned char | Ver [] = "dsPid33 2.2.6 Guiott 12-11" |
| void __attribute__ | ( | (interrupt, no_auto_psv) | ) |
| void _ISR_PSV _DMA5Interrupt | ( | void | ) |
| void _ISR_PSV _DMA6Interrupt | ( | void | ) |
| void _ISR_PSV _DMA7Interrupt | ( | void | ) |
| void _ISR_PSV _IC1Interrupt | ( | void | ) |
| void _ISR_PSV _IC2Interrupt | ( | void | ) |
| void _ISR_PSV _T1Interrupt | ( | void | ) |
| void _ISR_PSV _T2Interrupt | ( | void | ) |
| void AdcCalc | ( | void | ) |
| void ConstantsDefaultR | ( | void | ) |
| void ConstantsDefaultW | ( | void | ) |
| void ConstantsError | ( | void | ) |
| void ConstantsRead | ( | void | ) |
| void DeadReckoning | ( | void | ) |
| void DelayN10us | ( | int | n | ) |
| void DelayN1ms | ( | int | n | ) |
| unsigned char GetMap | ( | int | Xpnt, |
| int | Ypnt | ||
| ) |
| void InitAnglePid | ( | void | ) |
| void InitDistPid | ( | void | ) |
| void InitPid1 | ( | void | ) |
| void InitPid2 | ( | void | ) |
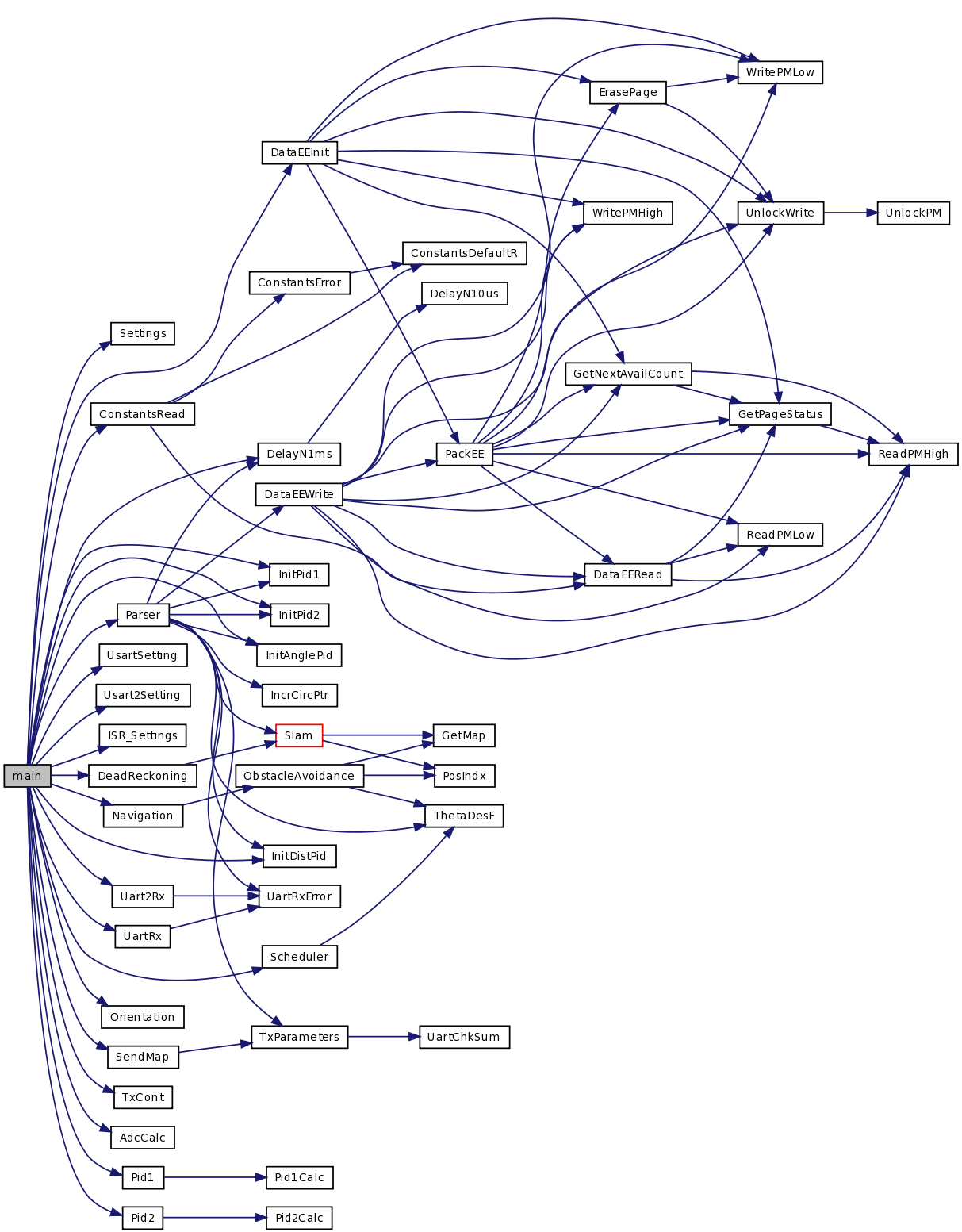
| int main | ( | void | ) |
| void Navigation | ( | void | ) |
| float ObstacleAvoidance | ( | float | DPosX, |
| float | DPosY, | ||
| int | DistTarget | ||
| ) |
| void Orientation | ( | void | ) |
| void Parser | ( | void | ) |
| void Pid1 | ( | void | ) |
| void Pid1Calc | ( | void | ) |
| void Pid2 | ( | void | ) |
| void Pid2Calc | ( | void | ) |
| int PosIndx | ( | float | Pos | ) |
| void Scheduler | ( | void | ) |
| void SendMap | ( | void | ) |
| unsigned char Slam | ( | float | PosX, |
| float | PosY, | ||
| int | Cell | ||
| ) |
| void ThetaDesF | ( | float | Angle | ) |
| void TxCont | ( | void | ) |
 1.7.6
1.7.6