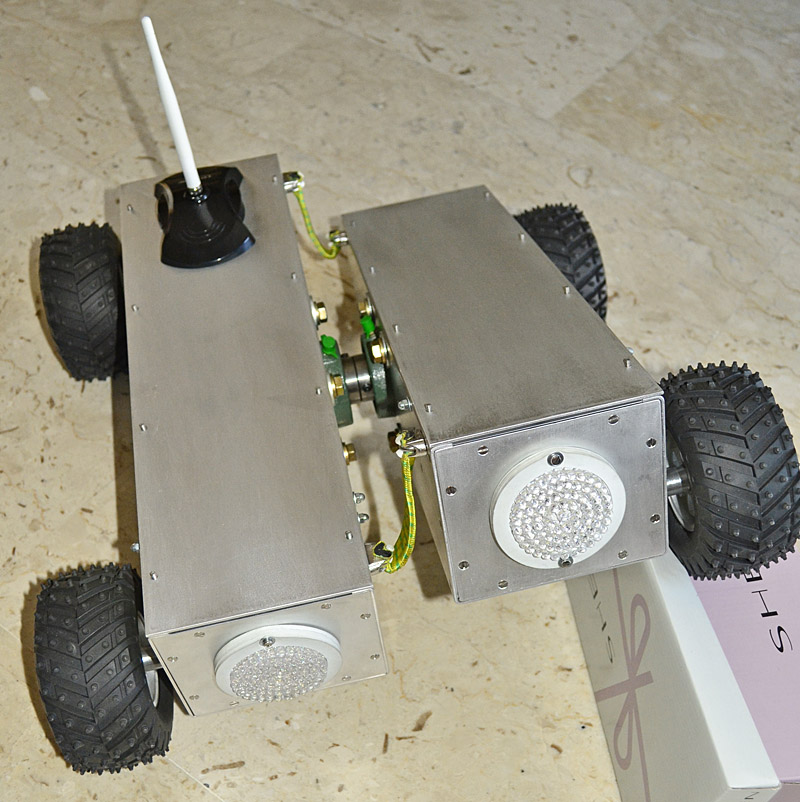
A photo gallery of Lino exhibition during OfficineRobotiche 2015 event


Articulated mechanics
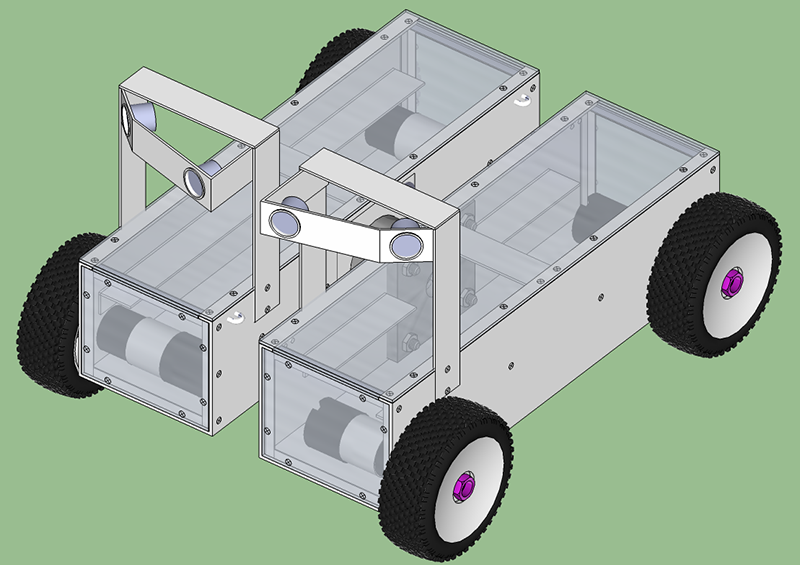
After following many episodes of Robotica I was fascinated by one of the winners: Flexy Flyer. It is so simple and efficient on going everywhere and “over” everything. Starting on self-constructing an outdoor robot, this is the mechanical configuration I’ve thought about.
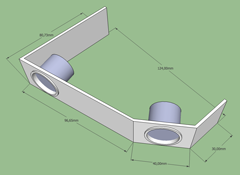
The most important thing on this kind of articulated chassis robot is the central hub. There are a lot of flanged bearings available, different quality, precision and, of course, costs.
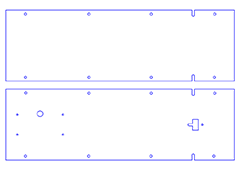
The project for the mechanic structure goes ahead. The complete Google SketchUp project is available here. It contains many layers that allows you to view every details, included quotes for exact measurements.