Tino il robottino
Lo scopo di questo "esperimento" è quello di riprodurre l'esperienza di Dino con componenti commerciali. Dino è nato con il metodo "Vediamo cosa ho nel cassetto". Per Tino volevo fare in modo che tutti i componenti fossero facilmente reperibili in commercio con i canali standard. I concetti di base sono quindi molto simili ma per ogni parte posso fornire esatte indicazioni per l'acquisto in modo che chiunqe possa ripetere la stessa esperienza.
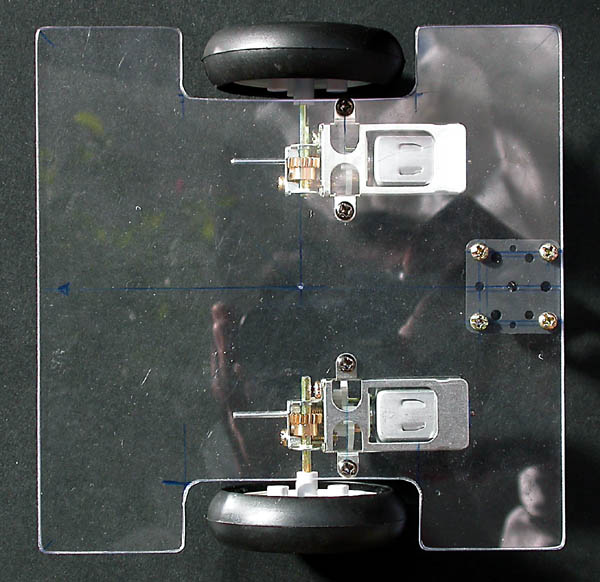
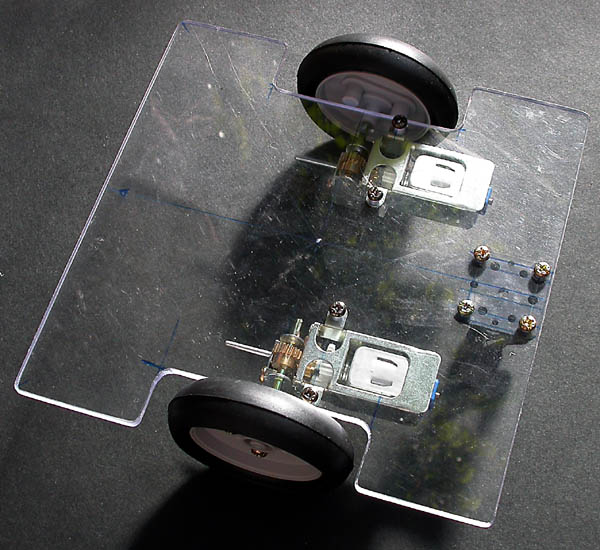
Per la base ho usato un foglio di Lexan (policarbonato) da 150 x 150 x 4mm reperibile nei siti specializzati per la robotica amatoriale (vedi link in fondo alla pagina), già tagliato in questo formato che permette di costruire una base che risponde ai nostri requisiti. Il Lexan si lavora molto bene senza la necessità di attrezzi particolari, ho usato un archetto da traforo per gli scassi delle ruote, un trapano da modellismo con supporto a colonna per i buchi, lima e carta abrasiva per le rifiniture. A dire il vero sono stato un po' pigro proprio con le rifiniture, avrei potuto sagomarlo in una forma meno "tecnica" e invece mi sono limitato ad arrotondare leggermente i bordi.
L'unica precauzione da prendere è quella di raffreddare bene gli utensili durante la lavorazione, il policarbonato infatti, dissipa pochissimo il calore ed ha una temperatura di fusione abbastanza bassa, è facile, anche con il seghetto a mano, che l'utensile si impasti. Quindi: velocità di lavorazione bassa e pause frequenti oppure raffreddamento continuo con aria o acqua.
(vedi: motori per la descrizione).
Anche le ruote ed il punto di appoggio posteriore sono gli stessi di Dino:
Tamiya Narrow Tire Set e Tamiya Ball Caster.
I concetti per le forature, i posizionamenti e la distribuzione dei pesi sono quindi facilmente mutuabili dal progetto precedente.
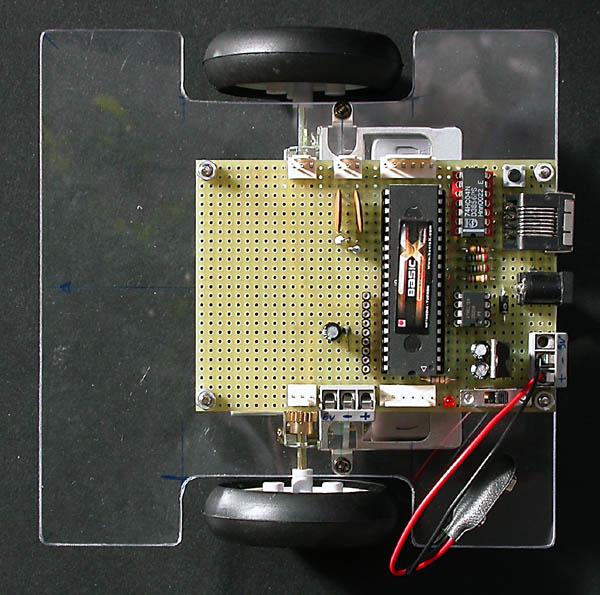
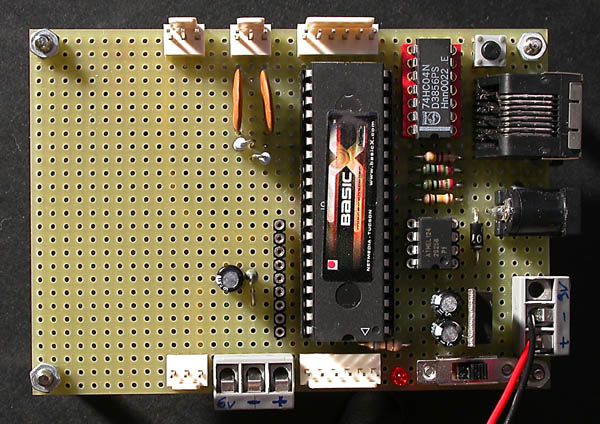
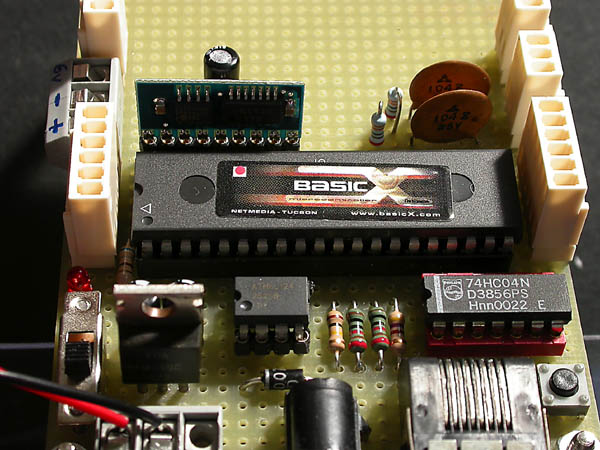
La serie BasicX si programma in seriale, senza togliere il chip dal circuito e direttamente in Basic. La programmazione è alla portata di tutti ed in breve tempo pur avendo un sistema potente e flessibile.
Tramite i link in fondo alla pagina si possono trovare molti esempi, oltre a tutta la documentazione necessaria ed al sistema di sviluppo (free).
Per avere il massimo di flessibilità durante lo sviluppo senza perdere troppo tempo, ho usato una basetta millefori per montare il tutto.

L'ibrido della Pololu "Micro Dual Motor Serial Controller" ha tutti i componenti per comandare i due motori usando una sola linea seriale del BasicX.
Basetta mille-fori 100 x 70 mm
Microcontrollore BasicX BX35
Kit componenti per BasicX BX 35
Regolatore di tensione 78M05
Pololu Micro Dual Motor Serial Controller


Non volevo però perdere la semplicità di un sensore completamente integrato.
Anche l'utilizzo di un sistema a riflessione semplifica la costruzione dell'encoder.
La scelta e ricaduta sui fotoriflettori Hamamatsu P5877 che sono facilmente reperibili e rispondono ai requisiti richiesti.
La descrizione della soluzione adottata merita una pagina a parte.
| Pololu micro dual serial motor controller tutte le info necessarie sul controllo motori |
www.pololu.com/products/pololu/0401/ |
| Basicx Yahoo! Group Mailing list di utilizzatori e fan del Basicx |
groups.yahoo.com/group/basicx/ |
| Sito ufficiale Basicx Documenti, schemi, esempi, link utili |
www.basicx.com/ |
| Robot Italy La maggior parte dei componenti necessari li ho trovati qui. Forse qualcosa si può trovare negli USA a prezzi un po' minori ma tra spese di spedizione e tasse varie... |
www.robot-italy.com/ |
