updated on 25-08-2012
dsNav
Motors
Micromotors E192-12-25
INPUT
Total mass of robot: 8 Kg
Number of drive motors: 4 [#]
Radius of drive wheel: 0.06 m
Velocity of robot: 1 m/s
Maximum incline: 20 [deg]
Supply voltage: 12 [V]
Desired acceleration: 0.1 m/s^2
Desired operating time: 30 min
Total efficiency: 65 [%]
Using the Drive Motor Sizing Tool on RobotShop, this is the motor we need:
OUTPUT (per drive motor)
Angular Velocity 159.24 rev/min
Torque* 6.5024 kgf-cm
Total Power 10.631 W
Maximum current 0.88595 [A]
Battery Pack 1.7719 [AH]
The Micromotors motor E192-12-25 fits the requirements:
Maximum torque 90 N cm (9.2 Kgf cm)
Speed 105-160 rpm (Max torque - No load)
Current 1.75-0.4 A (Max torque - No load)
Maximum torque 90 N cm (9.2 Kgf cm)
Speed 105-160 rpm (Max torque - No load)
Current 1.75-0.4 A (Max torque - No load)
ATTENTION!
Those motors are usually sold with internal capacitors, to fulfil the EMI regulations that many countries have. They are not compatible with high frequency PWM in LAP mode we are going to use. During the order be careful to specify the WOC (WithOut Capacitors) type.
Those motors are usually sold with internal capacitors, to fulfil the EMI regulations that many countries have. They are not compatible with high frequency PWM in LAP mode we are going to use. During the order be careful to specify the WOC (WithOut Capacitors) type.
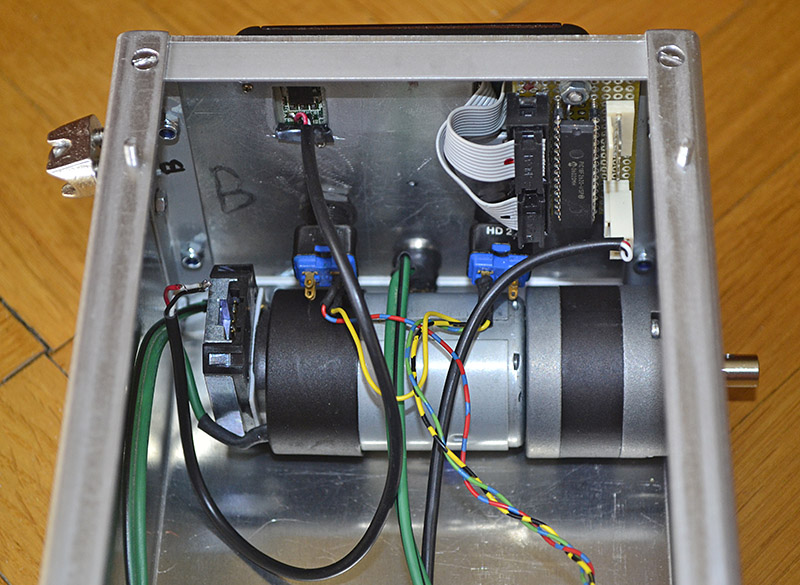
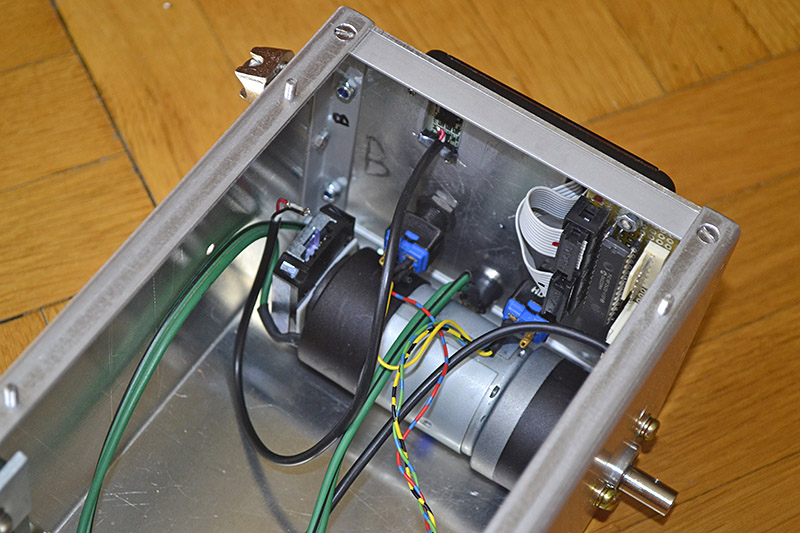
The motor with the quadrature encoder installed and mounted on the mechanics.