Like a human, a robot needs some senses to know what's out there. The most common sensor used for indoor navigation is the InfraRed (IR) one. It's cheap, easy to manage and reliable enough to enable a safety navigation through the usual furniture in an apartment.
Let's compare once again what's inside the commercial cleaning robot we are analyzing with the technologies
used in our amateur robots.
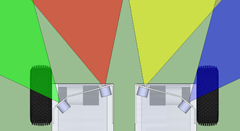
Navigating outdoor requires some different technologies, because of the sunlight that radiates a lot of IR rays blinding the sensors. In the example to the right Lino robot uses UltraSound (US) sensors, the same used for parking assistance in the cars.
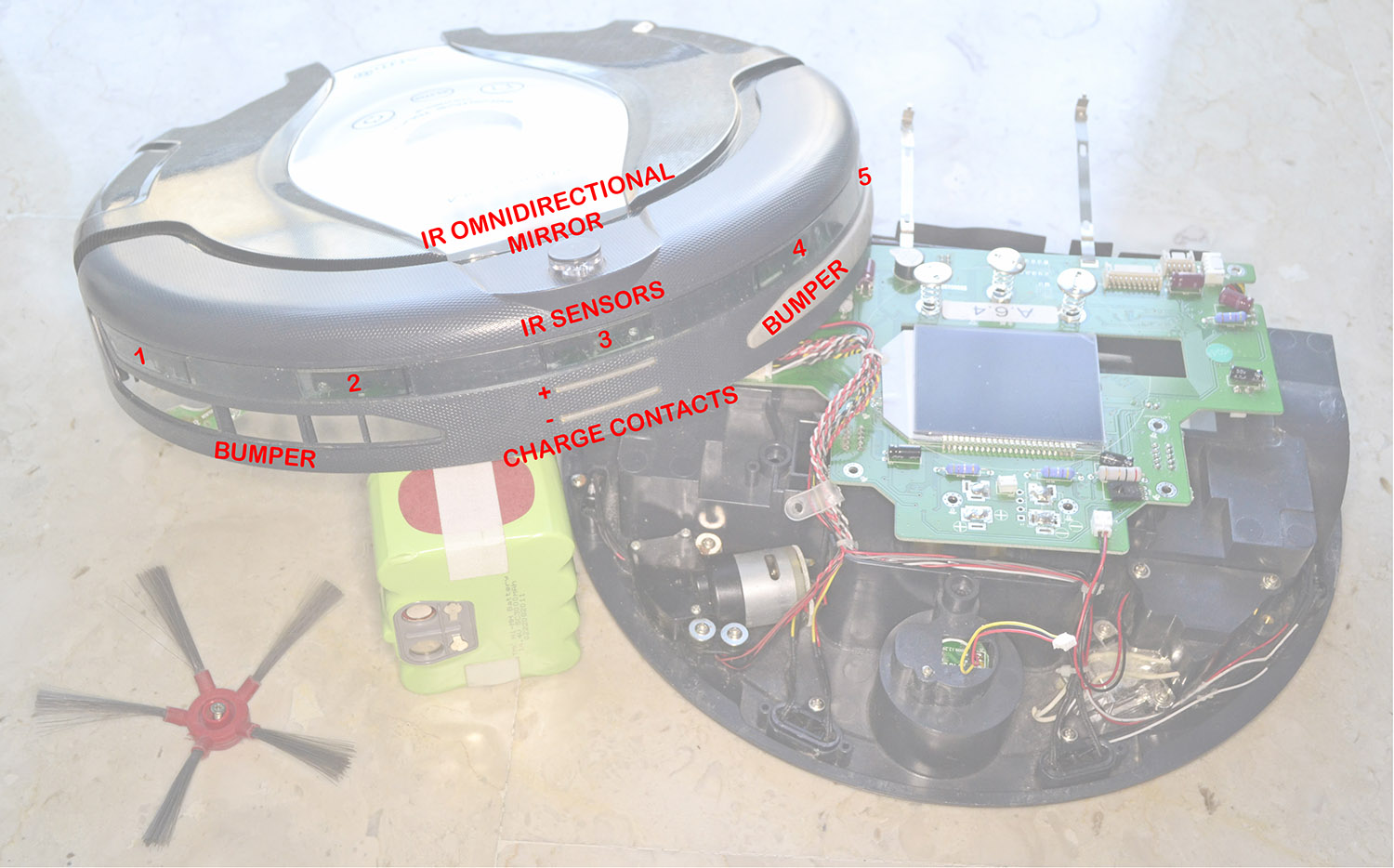
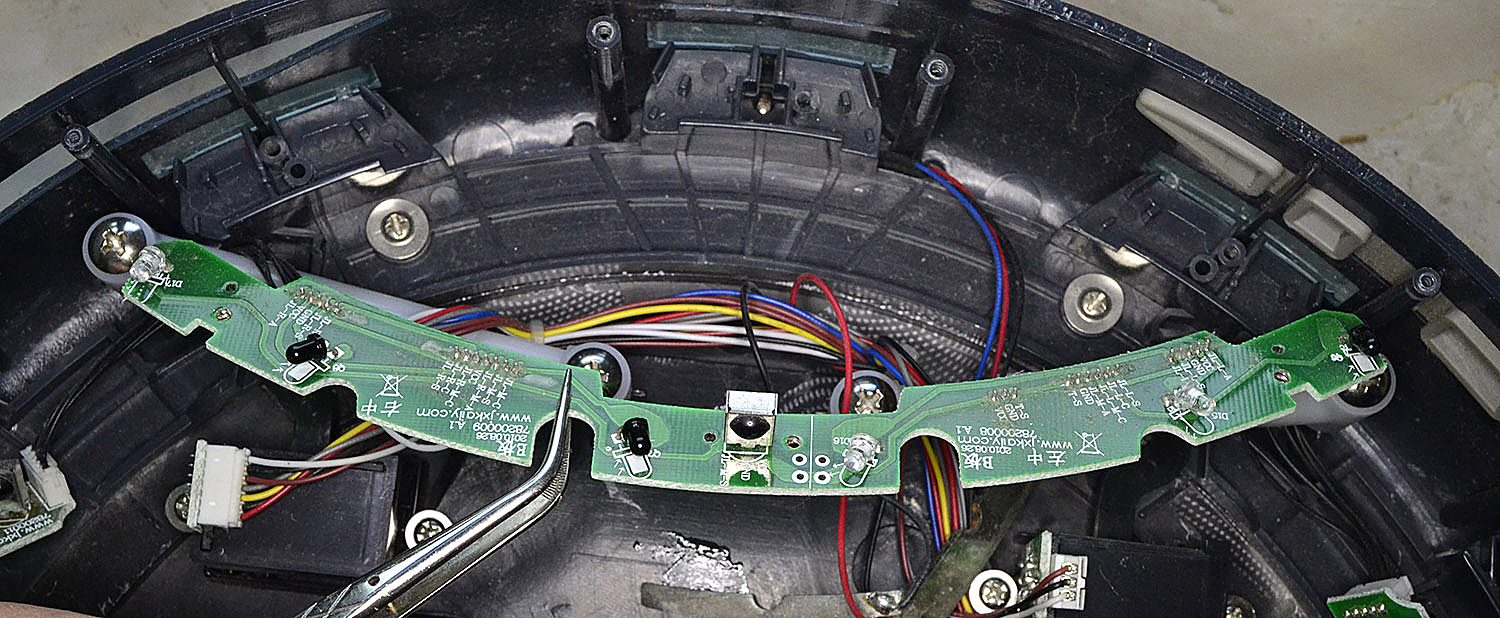
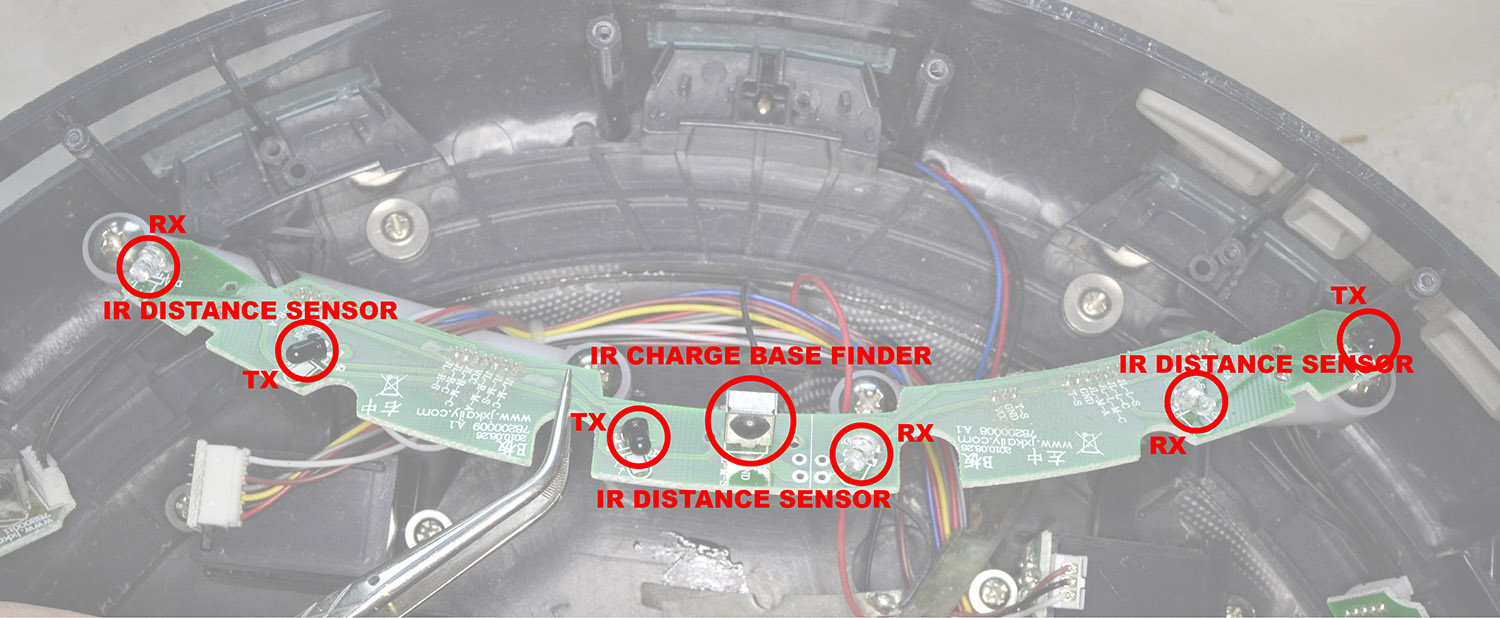
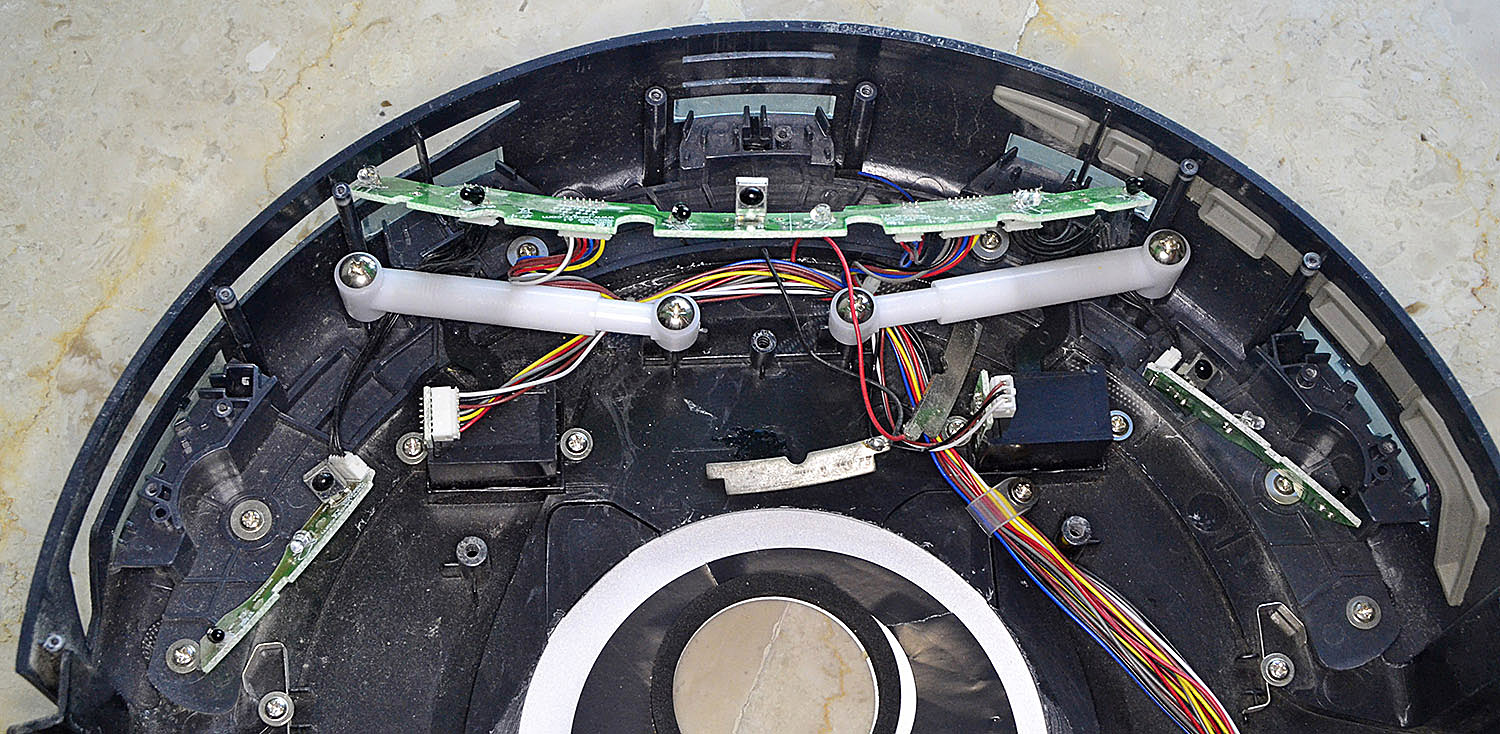
The sensors are obviously located in the front, according to the direction of travel. The front part is movable and accommodates the IR obstacle detection sensors, the bumper and the charge dock finders.
The IR sensors radiate in a narrow beam angle, this requires at least 5 sensors to be able to detect objects in a 180° field of view.
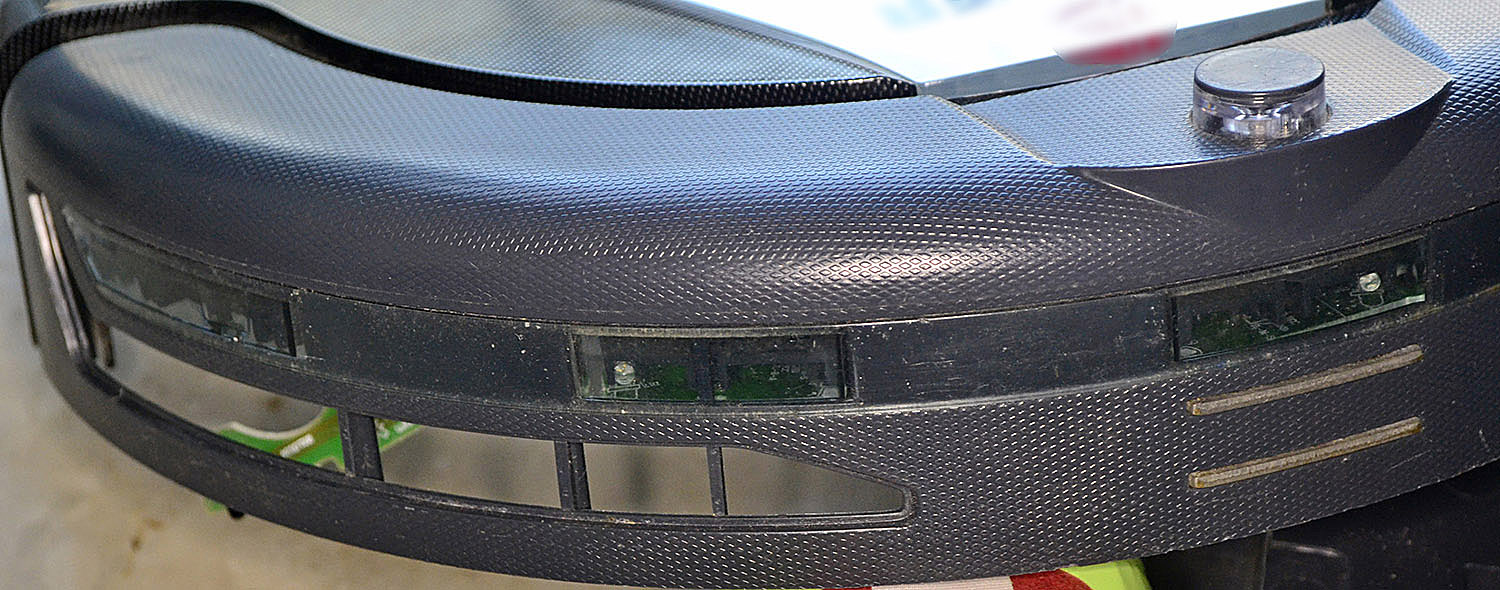
Central sensors
Side sensor detail
Obstacle avoidance sensors
Be conscious of the surrounding environment