Because of its technology IR sensors, as any other kind of sensor, has pros and cons. It's always a good idea to mix different technologies to get the best from all of them. Look at this pages to know different approaches to this issue.
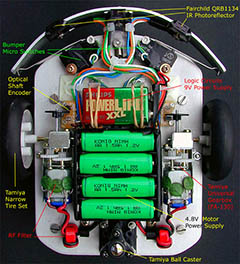
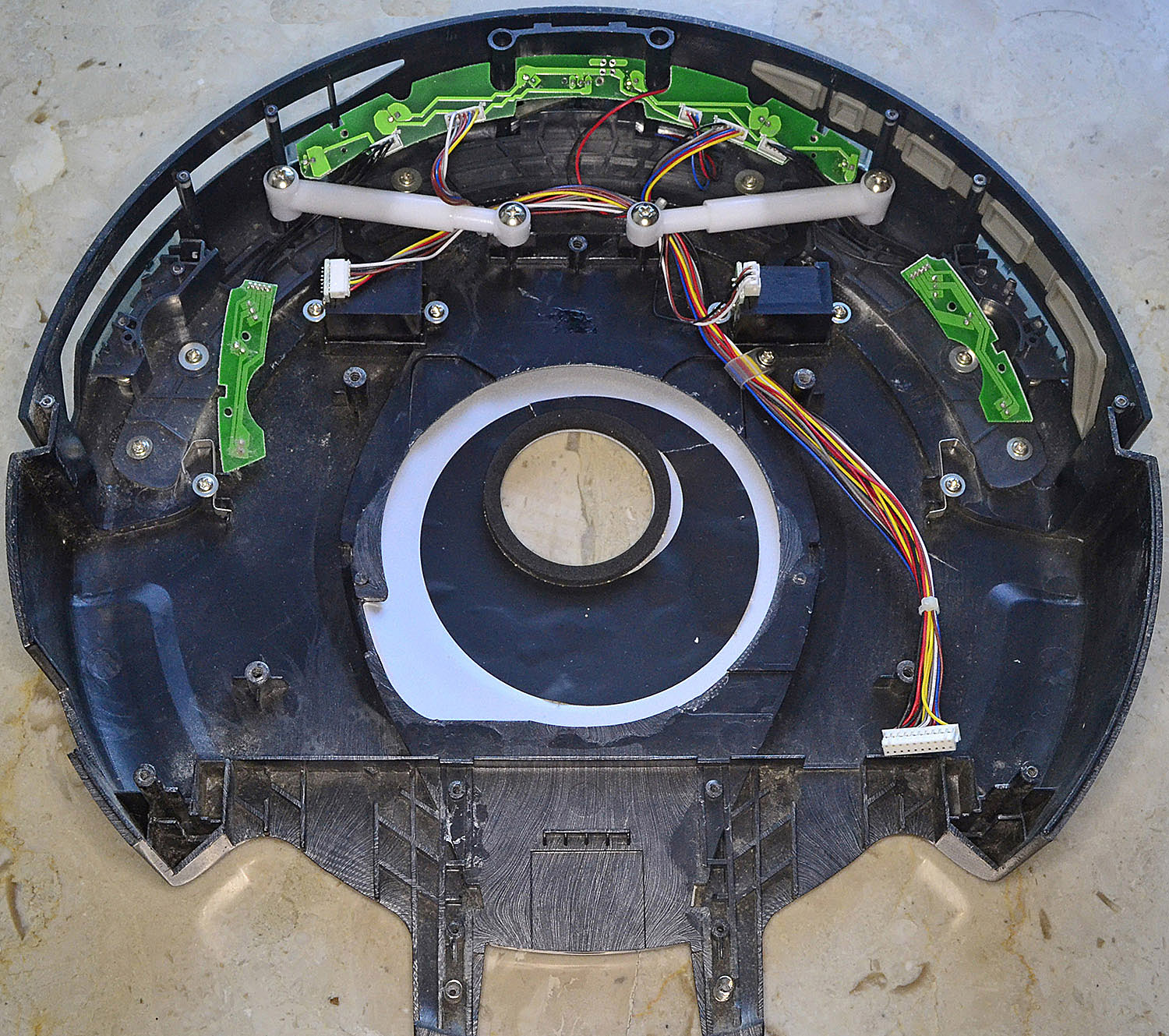
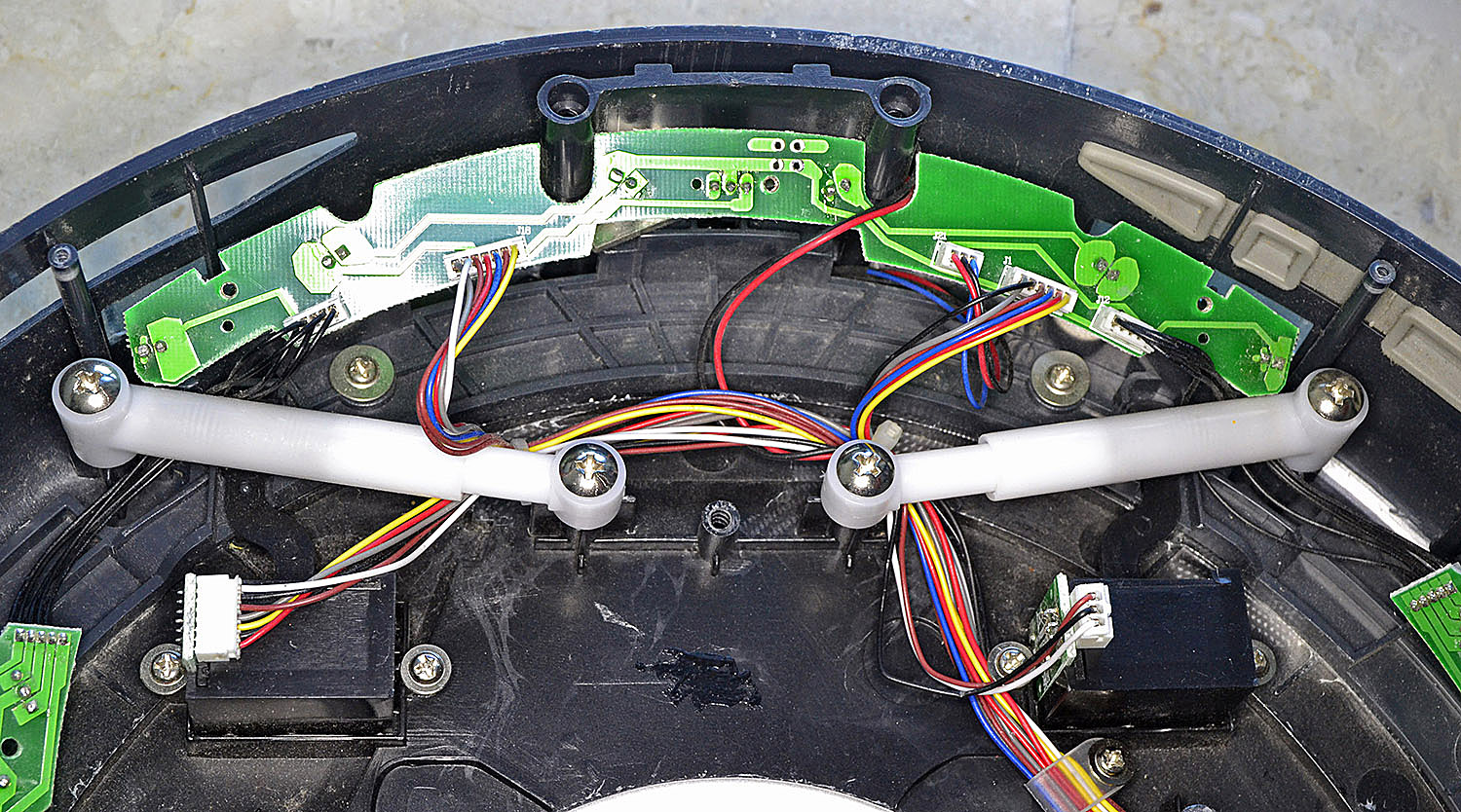
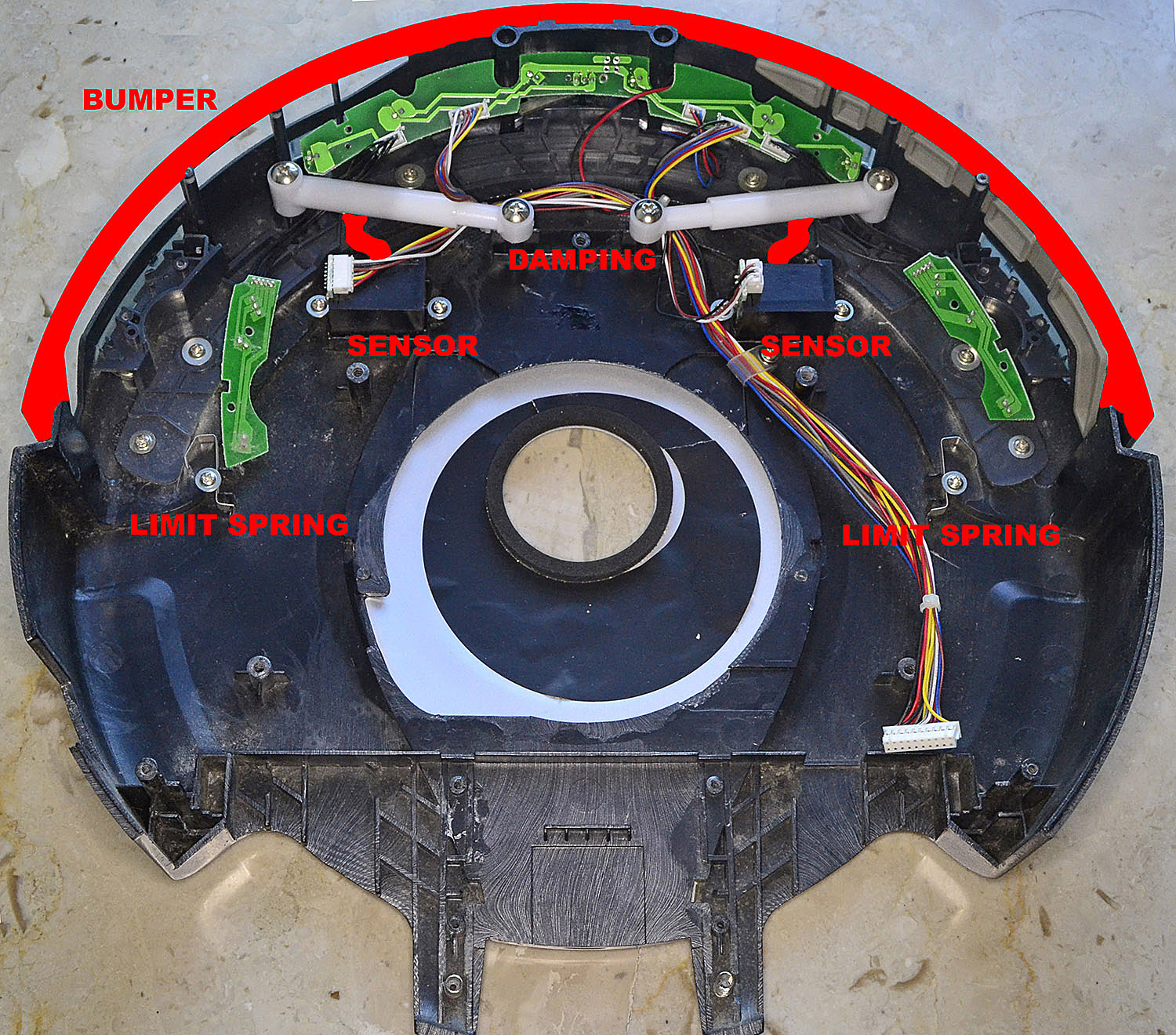
A tactile sensor is always made of a moving part that touches the object, some springs or similar to damp the strike and the electronic sensors (mechanical switches, IR forks or similar) that tells to the brain what's happening.
The last chance to avoid obstacles is... touching them when everything else fails. This is the most reliable sensor and enable the robot to get very close to the objects, in order to clean even the most difficult corner.
Obstacle avoidance sensors