Simple Robotic Platform
This is an example of how to build up a very simple robotic platform with components and parts easy to find everywhere, without the needs of professional tools or equipment, and without a special skill on mechanical works.
The size of the base allows it's use in many different categories of robotic contests: Explorer, Line Follower, Can Collector, etc.
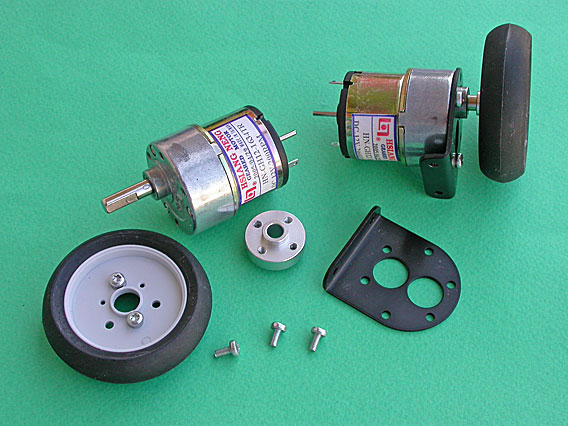
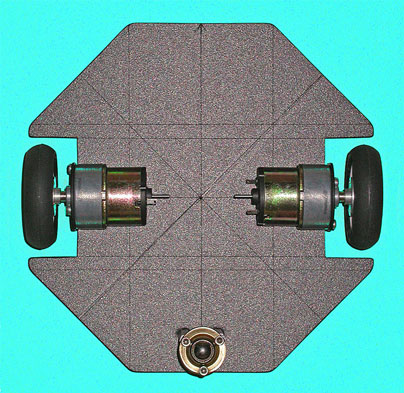
The motors and the wheels.
This kind of geared motors has a very good price/performance ratio. It has the motor axis long enough to install an encoder, both commercial or home-made.
I have chosen this kind of wheels in order to have the best precision for odometry (small contact point with terrain) but many other kind of wheels can be installed in order to improve other characteristics: grip, speed, etc.

The ball caster
comes from a do-it-yourself shop.
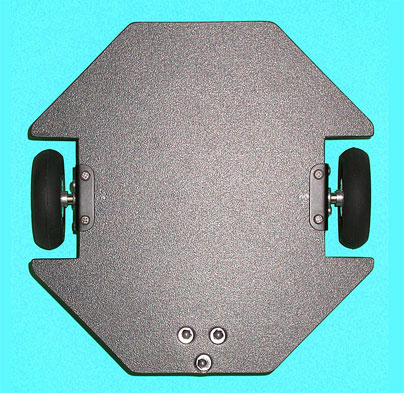
An animated explanation of how to pass from a square of expanded PVC to a robotic platform with some simple cuts.
This kind of materials are available on many robotic shops, already cut in in 200x200x5mm size.

Tools needed:
a cutter and a ruler.
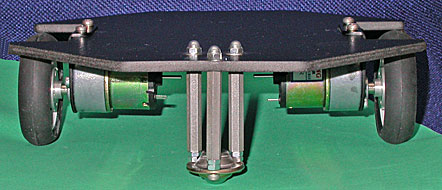
The result.


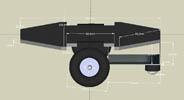
In this 3D project the ball caster is substituted with a Pololu Ball Caster with 3/4" Metal Ball attached to the battery holder and the motors have a 300 CPR optical encoder