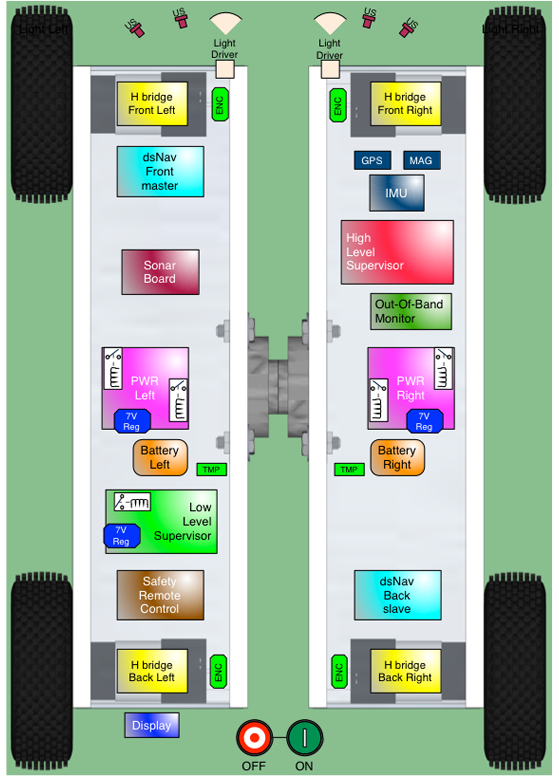
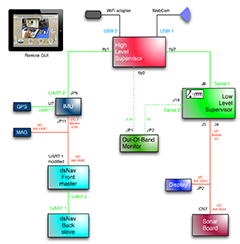
Click on the box to the right to see the logical block diagram and a description of the dependencies among different processors, communication channels and data exchanged.
|
|
Lino il Robottino
Click on the box to the right to see the logical block diagram and a description of the dependencies among different processors, communication channels and data exchanged. |
|
|
|
||
|
|
Map of the Lino section pages - BOM | updated on 02-08-2015 |
|
|
||