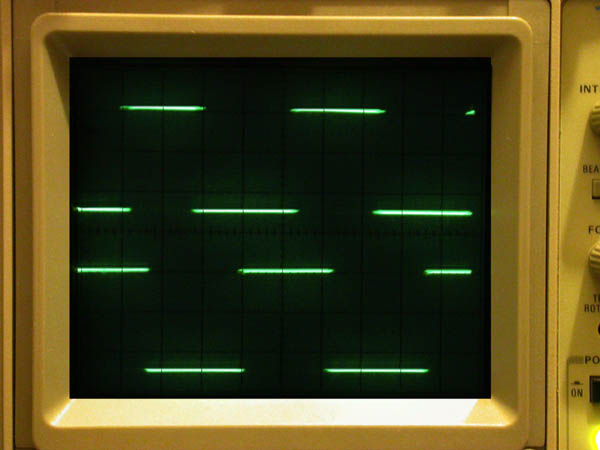
Analisi dei segnali
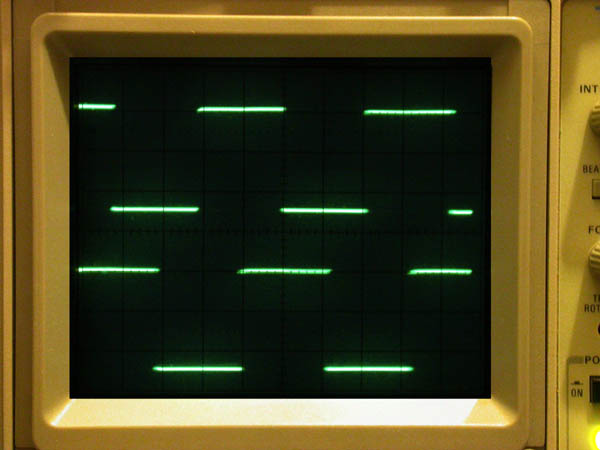
Quando OUT passa da alto a basso, OUT 90° è alto.
nella transizione basso -> alto di OUT, OUT 90° è alto, mentre è basso nella transizione inversa.
il numero di impulsi è il doppio dei settori bianchi.
Maggiori dettagli sugli encoder si possono trovare nei link elencati in PID
Un giro completo dell'encoder avviene ogni 50ms, un cambiamento di stato ogni 5ms, 200 impulsi per giro.
Contando solo gli impulsi di "OUT" (x2) si possono campionare i segnali ogni 2,5ms, con un oversampling di 2, sufficiente a ricostruire il segnale originale.
Con una ruota di 58mm di diametro, la risoluzione è: (58 * PI) / 200 = 0,9mm.
La velocità si può calcolare ogni 200ms, impostando il valore di PWM dei motori 5 volte ogni secondo.
Alla massima velocità (circa 20cm/s) il computo della velocità avverrebbe contando 40 impulsi, con un errore di quantizzazione: 1/40=2,5%.
Alla minima (circa 2cm/s) contando solo 4 impulsi, errore di quantizzazione: 1/4=25% .
Le prove pratiche ci diranno se questi valori sono sufficienti.