Sulla meccanica è stato montato il primo "strato" di elettronica, anche se non ancora completato.
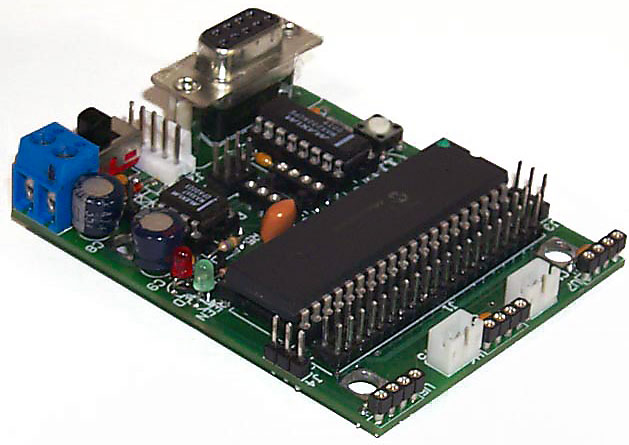
Il cuore del sistema è la mother board del robot "Mark III" (www.junun.org).
{kind=link}
Il Mark III è pensato per le gare di minisumo ma la progettazione è stata fatta in modo da adattarla a molti usi diversi.
Il processore è il PIC16f877 con clock a 20Mhz. (www.microchip.com)
La scheda processore del Mark III è predisposta per la sovrapposizione di "daughter boards" tramite il connettore "PIC bus". La prima scheda che ho usato è la sensor board, sempre di Junun. Questa è predisposta per il montaggio di sensori ed attuatori come: un accellerometro a due assi, un AD converter a 8 porte, un buzzer, un ponte ad H a quattro porte per pilotare i motori.
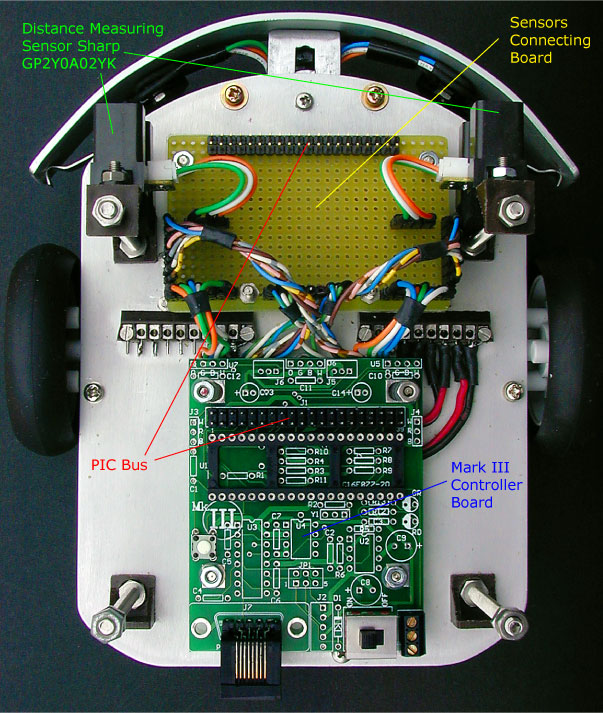
La scheda di interconnessione concentra tutti i sensori posizionati nella parte inferiore. Su questa saranno montati condensatori di filtro, resistenze di pull-up e tutto quello che serve per fornire un segnale pulito al PIC, col quale saranno collegati tramite il connettore a 40 pin. In tutto occuperanno 11 porte.
Sulle morsettiere sono collegati i motori e le alimentazioni.
