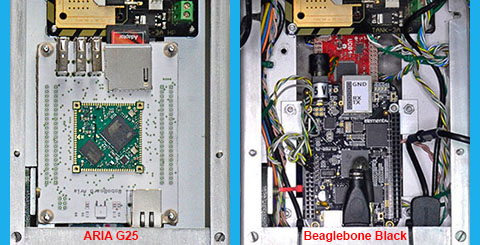
After some tests with ARIA G25 I switched on a Beaglebone Black Single-Board Computer still using a Debian Linux distribution. This allows an easy switchover using all the experience and the software already developed in javascript on node.js.
Some configuration of the board changed but the GUI evolution can be followed irrespective of the board on which it runs.

High Level Supervisor
Before start thinking about High Level Functions for the robot, spend some effort on the basic traveling functions via odometry and dead reckoning with the use of encoders and IMU.
Let me please use the word of one of my gurus, David Paul Anderson. Speaking about a robot competition, he said that you must accomplish in advance the very first test: make the robot running forward and back for some minutes:
“Seasoned robot builders will tell you that getting to this stage is most of the battle. To successfully run this first simple exercise, the robot builder must have some sort of functioning robot platform with wheels and motors and batteries attached, all mechanically and electrically sound; some sort of H-Bridge or other means of controlling the motors from a micro-controller; a micro-controller with the necessary I/O all wired up and working; a software development environment set up and working, with the ability to connect to the robot and download code; and a robust enough implementation that it can run for 10 or 15 minutes without crashing, resetting, coming apart, or having motor EMF spikes brown-out the cpu”.
While I was still working on mechanics, I received a news from ACME Systems directly from Sergio Tanzilli, a well known guy because of its training courses about Microchip PIC and because of the FOX embedded Linux board. He was still developing an embedded board with a very new concept: a lot of power at a very low price, with a lot of room for developing both HW and SW solutions. A bunch of us was invited to the laboratories for looking at the final phases of developing before the production started. Here there are some pictures of that event, were technology, music and food reached a very good mix.
A lot of ideas started that evening, included the development of a very simple and cheap board to carry the ARIA G25 system. I'm going to use that "System on Module" with the Roboboard Aria for the main brain of my robot.