It's not the purpose of these pages to teach everything about KNX. There are many pages on Internet, most from KNX organization itself, that deeply explain anything about it. Here there are just some basic concepts, useful to understand the choice of the solution adopted.
KNX is an open communication standard for building automation. As any other standard protocol it accurately defines the rules, for both hardware and software, to assure the compatibility with devices from different manufacturer. If the device (actuator, controller or bus device) is compliant with all the rules, it can be officially registered in the consortium database and gets all the advantages of being a part of the community.
In order to be easily adopted, the system must have a good compromise between simplicity and robustness, cost and flexibility.
The bus is a simple twisted pair that both deliveries the power for the devices and the bidirectional signals for communication.
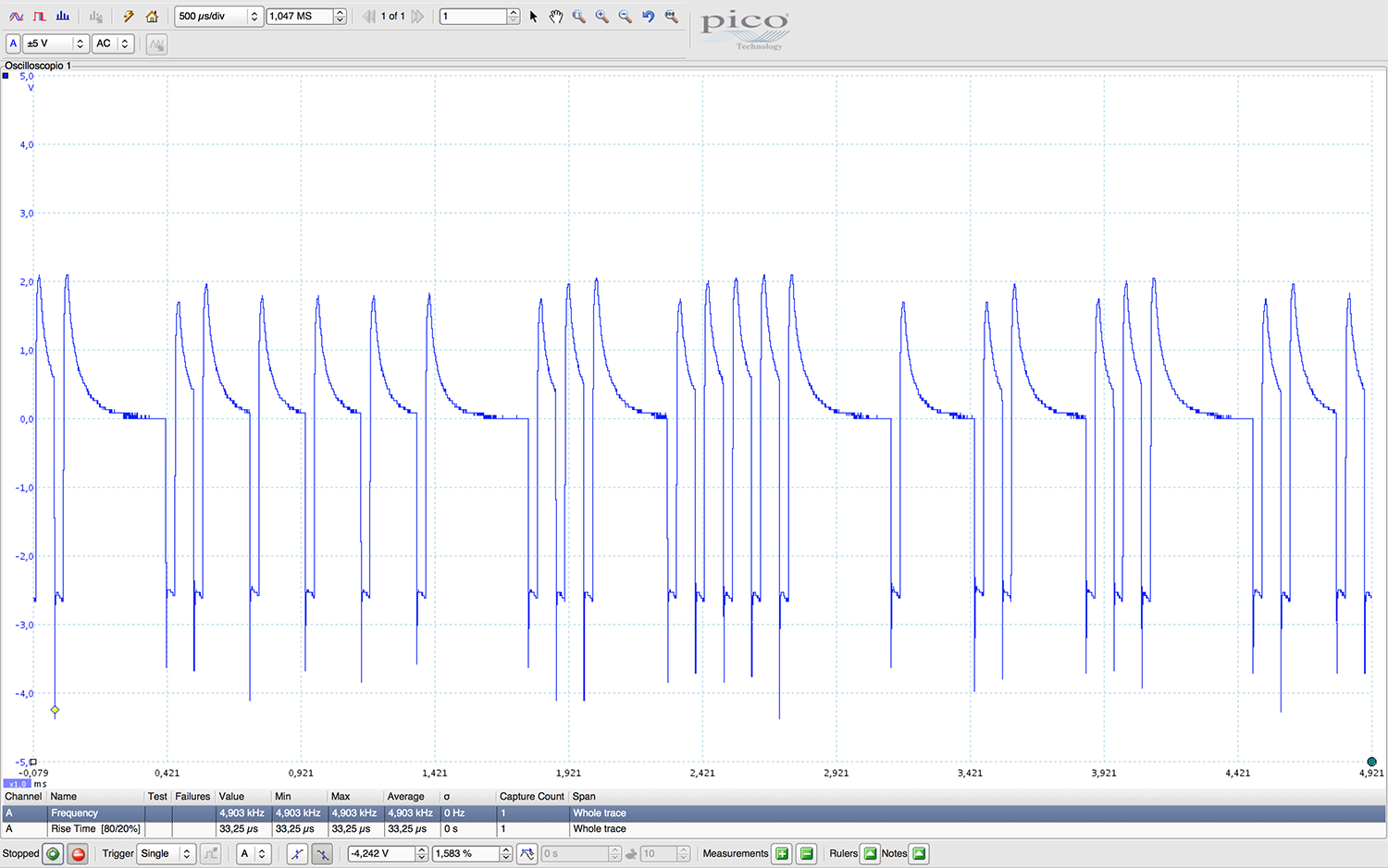
The signals are coded modulating the power bus as shown on the right. Using the inductance of the power supply, loaded on a 68Ohm resistor, the voltage level swings some volts around the idle level of about 30V.
A little bit of theory behind
The standard device used to interface the bus, compliant with the full standard, is the widely used Siemens TPUART chip. It converts the signals on the KNX bus in a standard serial communication usable from all the computers and microcontrollers.
Most of the projects available on internet, even open source, use this chip connected to a
microcontroller. The microcontroller must then run some software to decode/encode the so called "telegrams" (packets of data) to perform the actions required in the system, talking with other devices.