This is the central hub where all the information coming from the external sensors are gathered and computed according to the programmed strategy, and the actuators are controlled consequently in order to achieve the desired goal.
Usually the core of the control board is a microcontroller. It can be an 8 bit
MCU (like the
Atmel one in
Arduino board or the
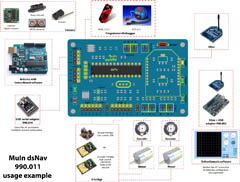
Microchip PIC18F family controller in the Aspirone robot), a 16 bit MCU (like the
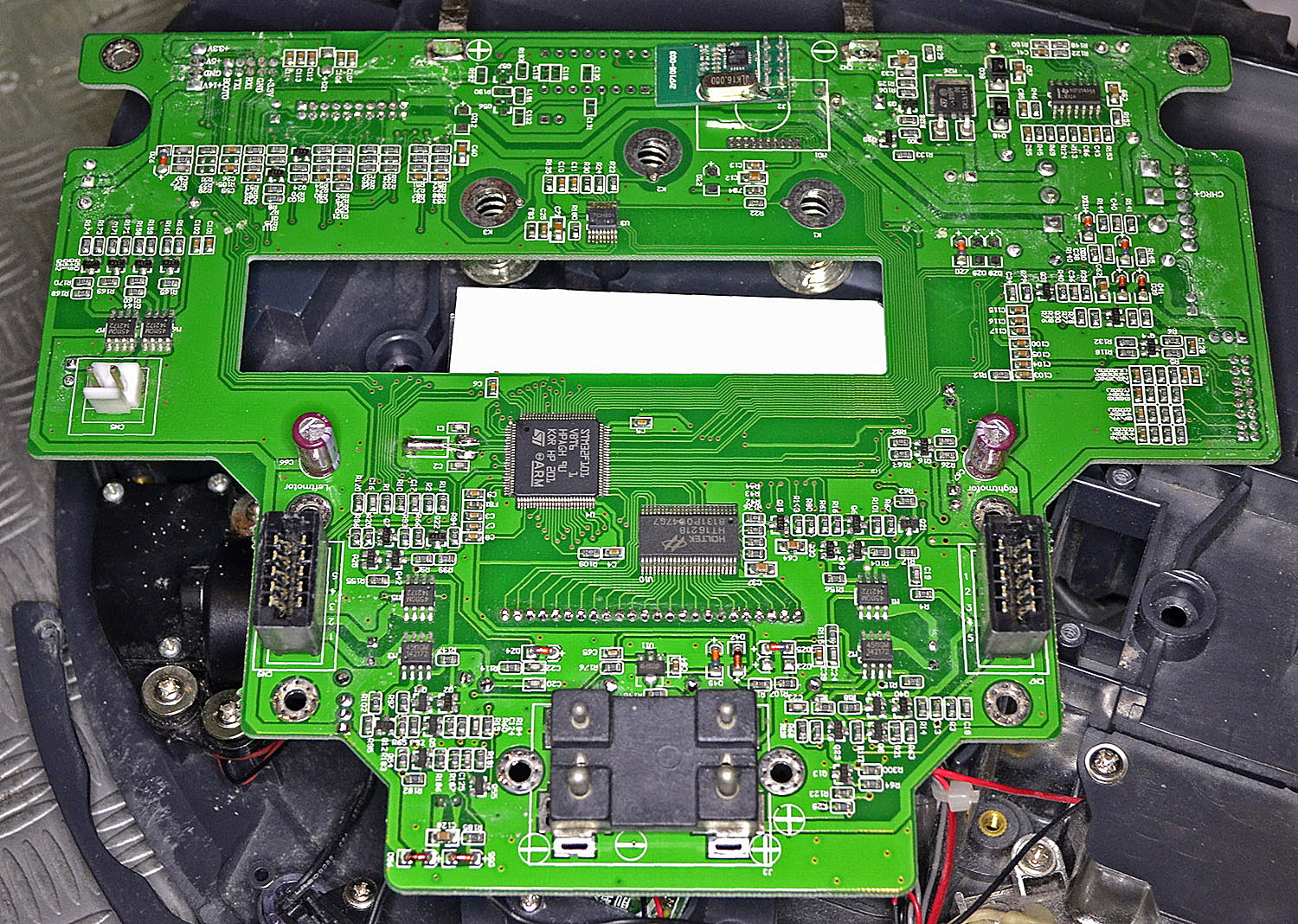
Microchip dsPIC in the dsNav navigation control subsystem used in both Lino and Rino robots) or a 32 bit MCU (like the
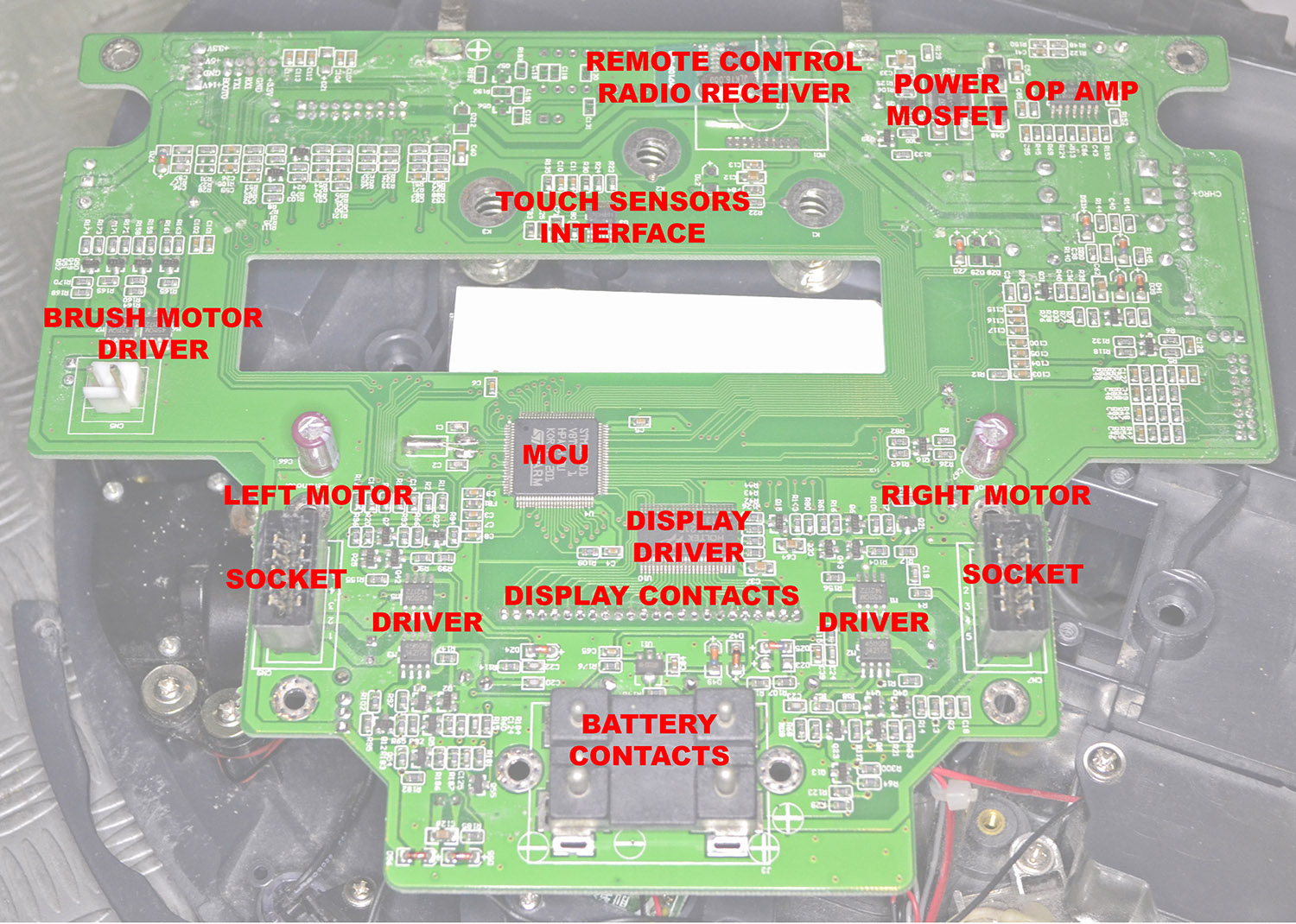
ST Microelectronics STM32F101 Cortex M3 used in the board described here).
Whichever MCU is used, it must be allocated in a board and connected to other devices on the board or to external peripherals in order to get information and control actuators and end-effectors.
Most of the devices used in this board are common to all the robots. Let's describe and compare them with the devices used in other robots.