When the battery status control circuit reveals that the charge level is under a given threshold, it switches to a power saving mode disabling all the unneeded circuits (brushes, UV lamp) and reducing the speed.
The robot starts searching for the charge station turning around the room randomly. When it reaches the base and the front contacts touch the base contacts, the robot stops all the motors and waits until the battery pack is fully charged.
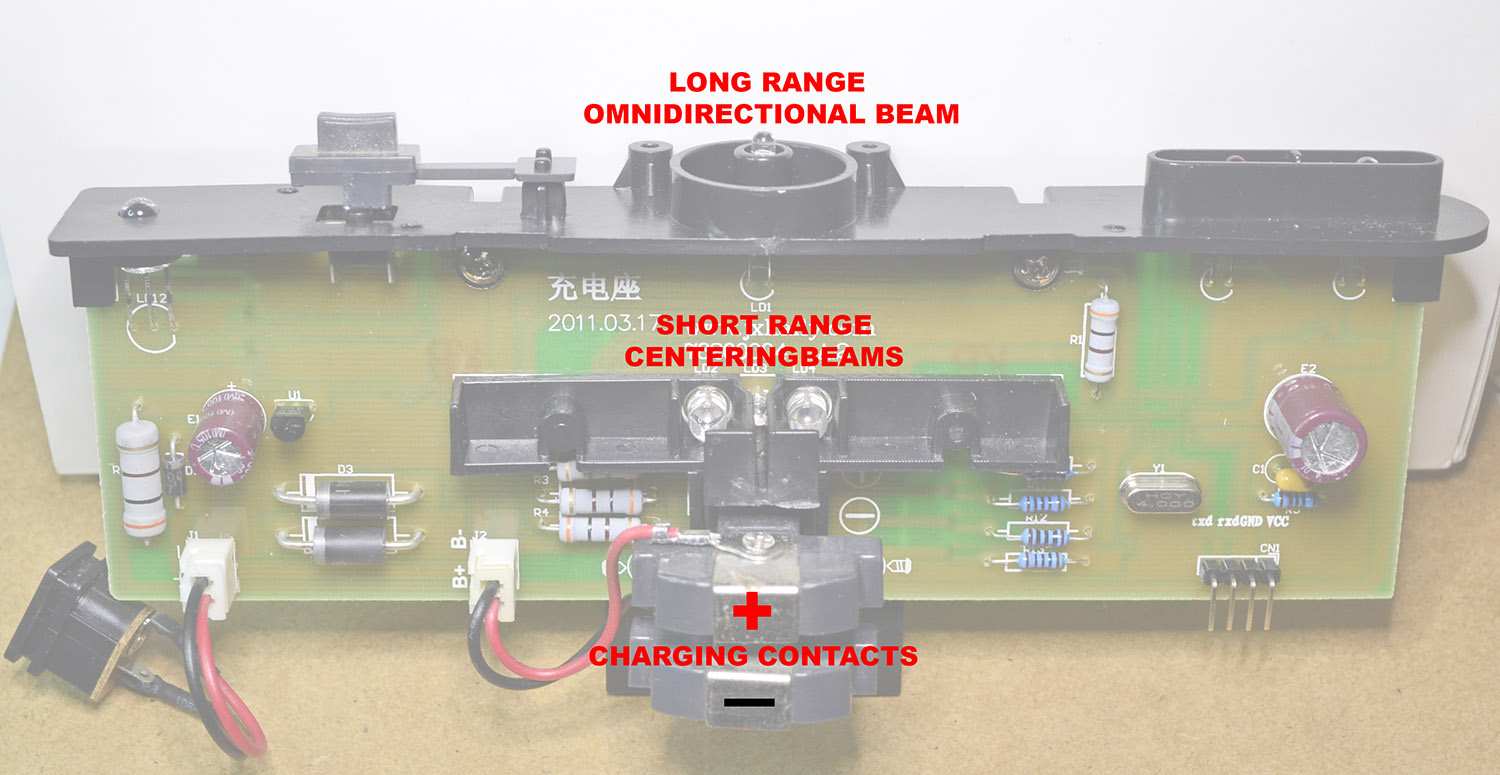
But... how does the robot find the dock? It's a very interesting system. The dock transmits three IR coded beams, one at the center, one on the right and one on the left. The central beam is diffused in a 360° field. The side beams are more directional and at a lower height.
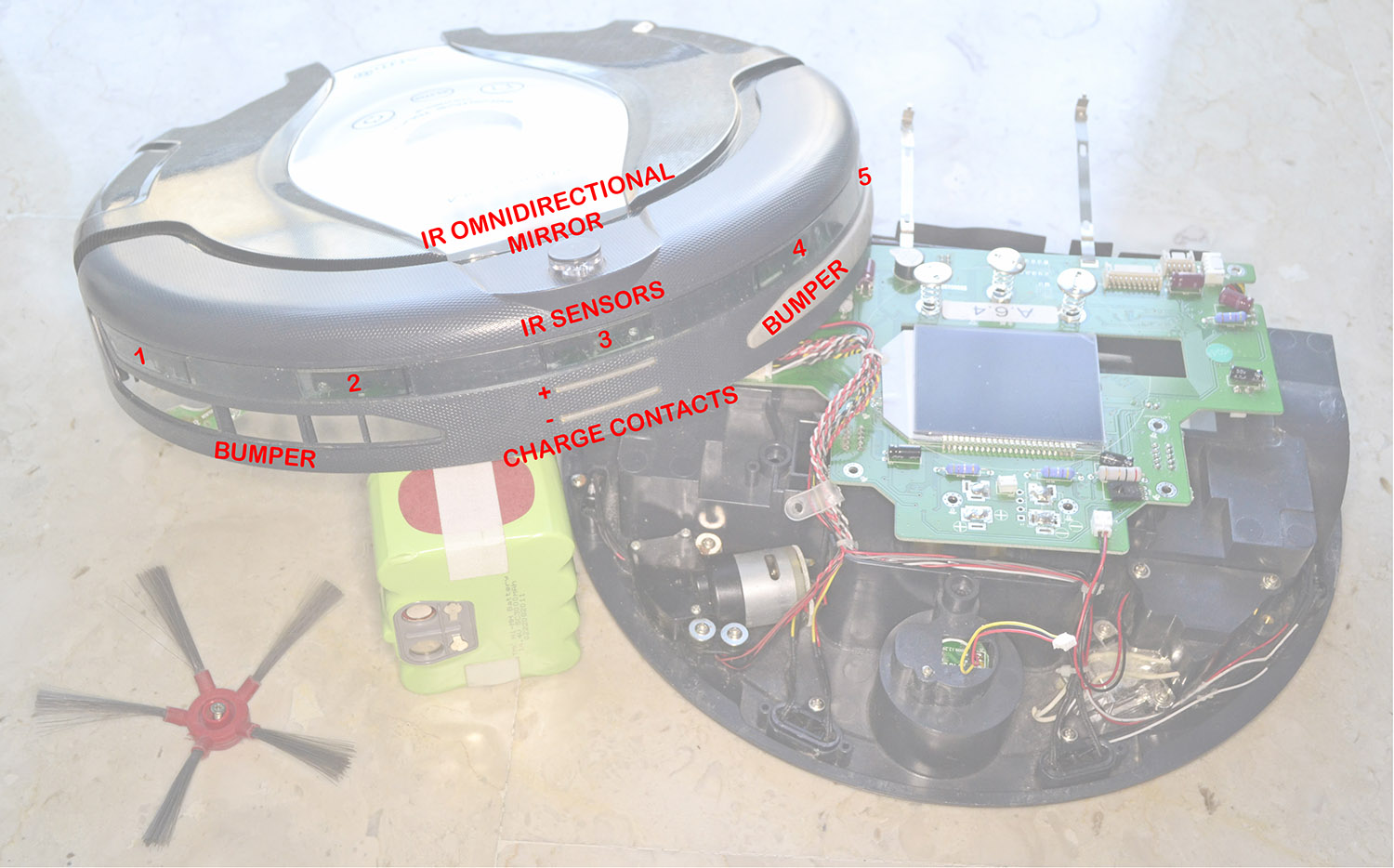
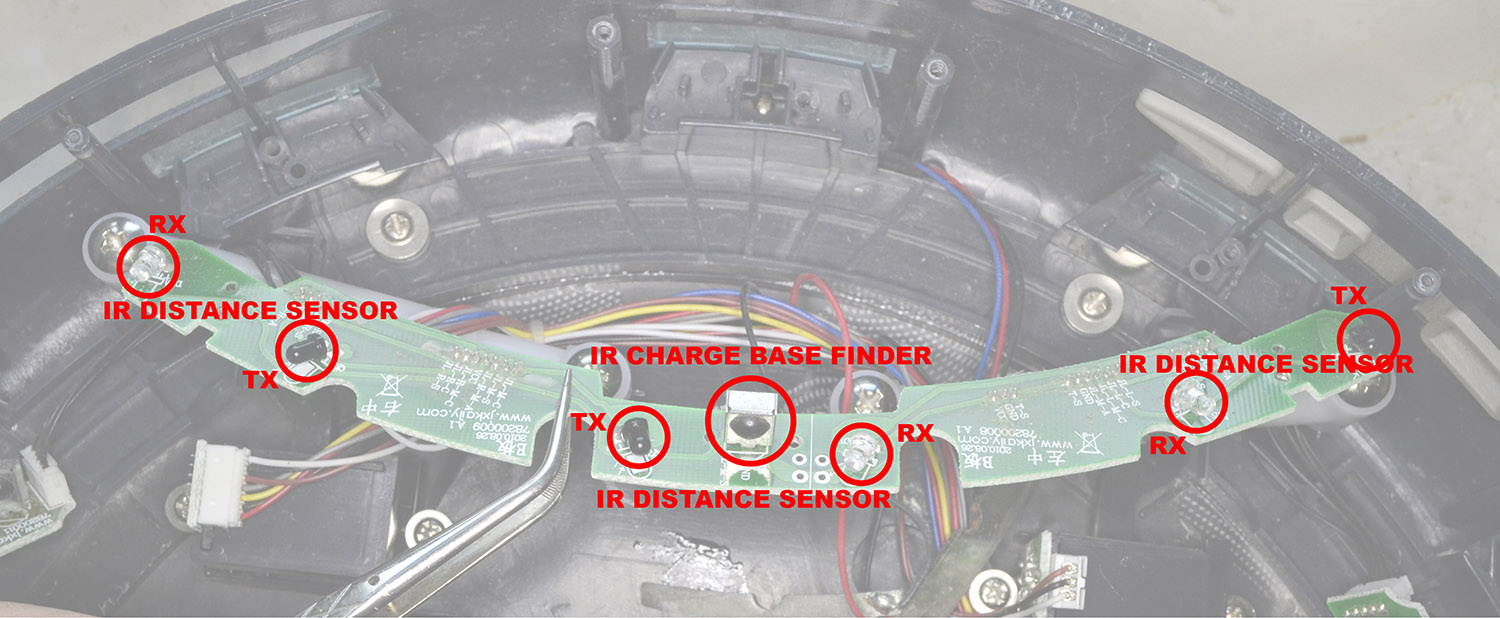
The robot has three IR receivers: center, right, left. These are the same sensors used for the remote controls on TV sets. They can decode the signal received, recognizing which transmitter is on the line of sight. When the robot is far away from the dock it receives mainly the central beam. Knowing which sensor is receiving the beam it can turn right or left traveling toward the charging base, getting closer to that.
When close enough to the charging contacts the robot receives the three signals with the three receivers. The vehicle slows down and refines its direction step by step to approach the contacts as straight as possible. When the bumper reveals the touch and the charging circuit detects the current flowing in, it stops everything and waits the charging cycle. If there is the touch but not the current, the robot travels a little backward and tries again the approach
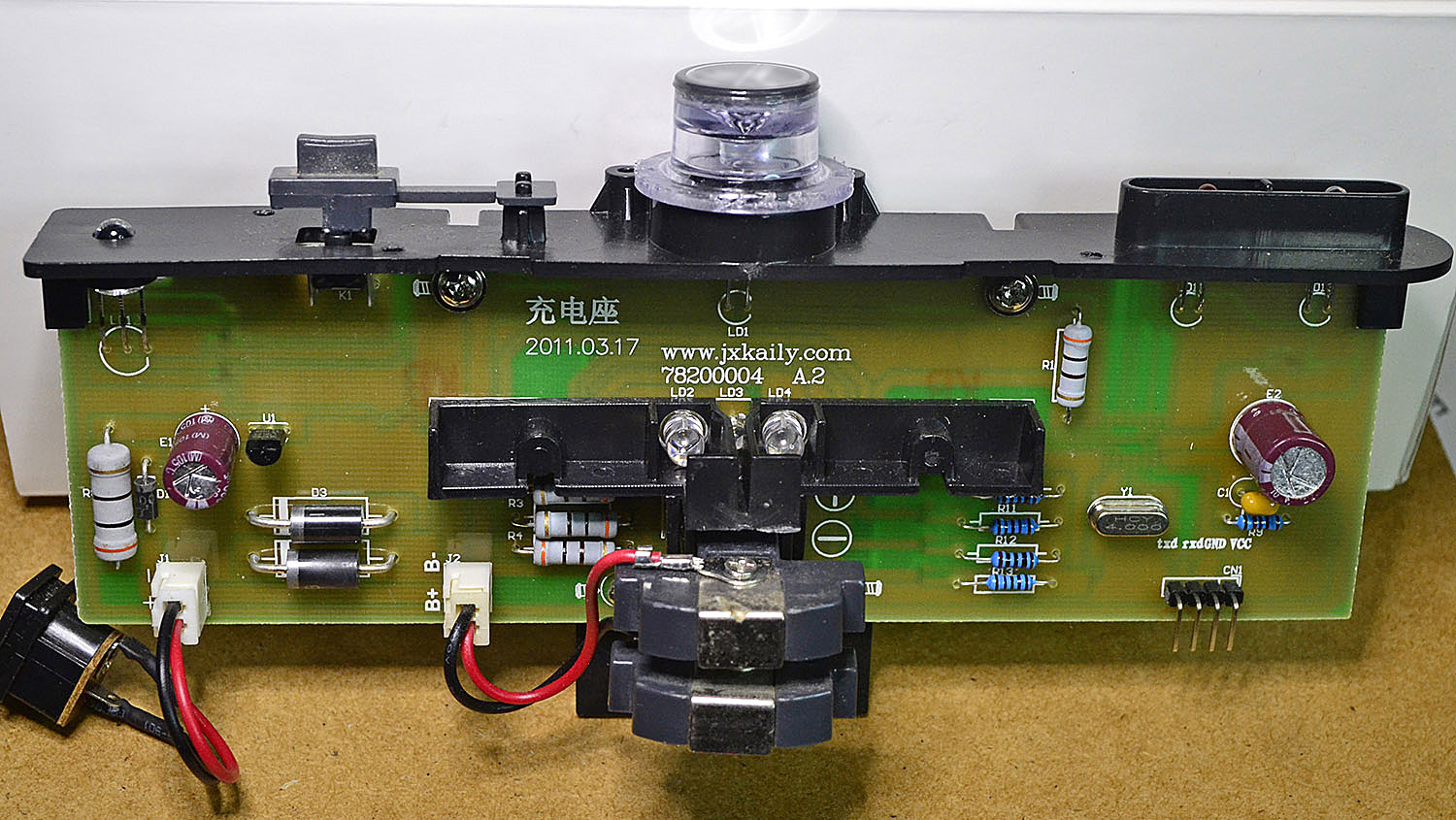
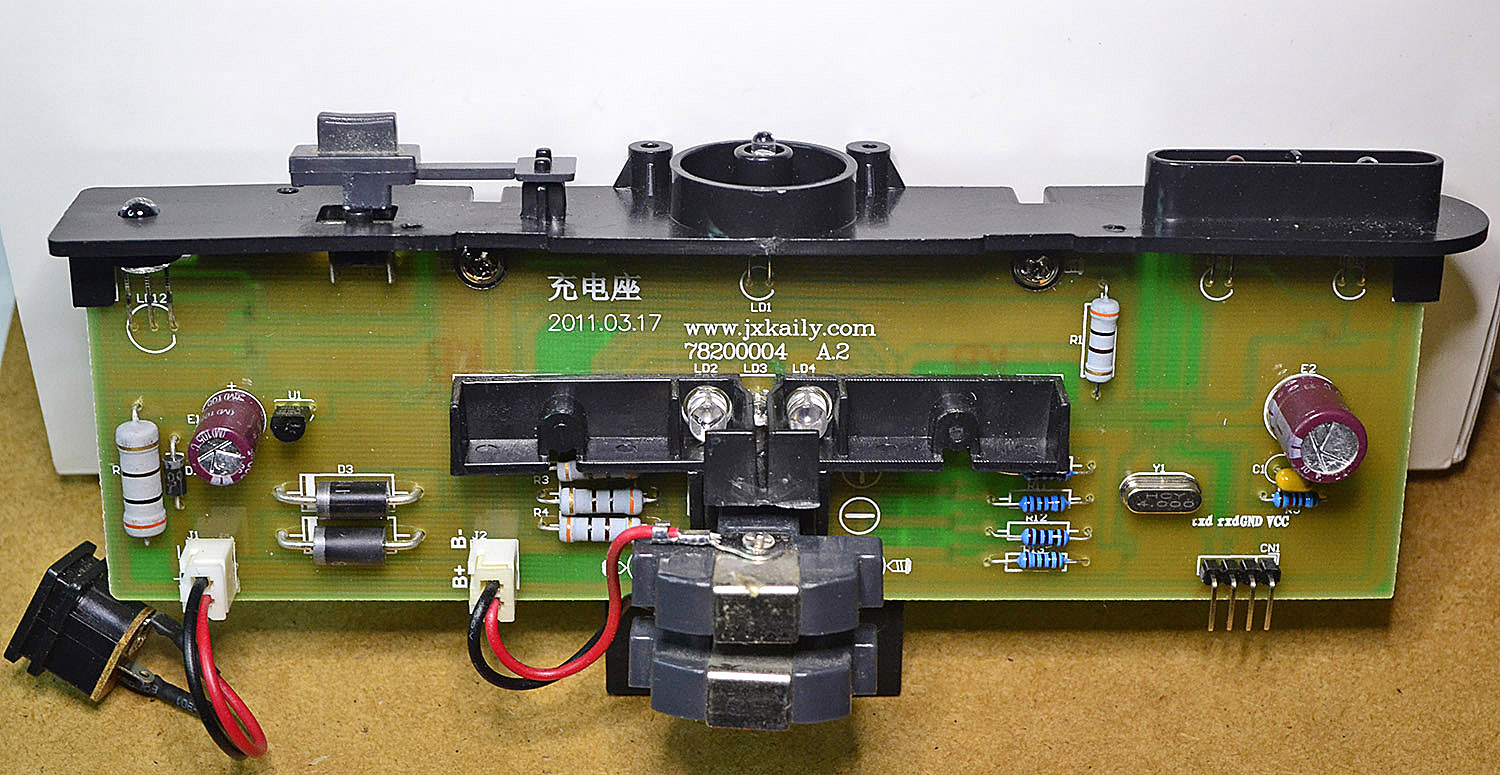
The Dock's central LED radiates its beams in a 360° field thank to an inverted cone mirror. Another very clever application of the technology. On the left a close-up view of the mirror useful to understand how it works.
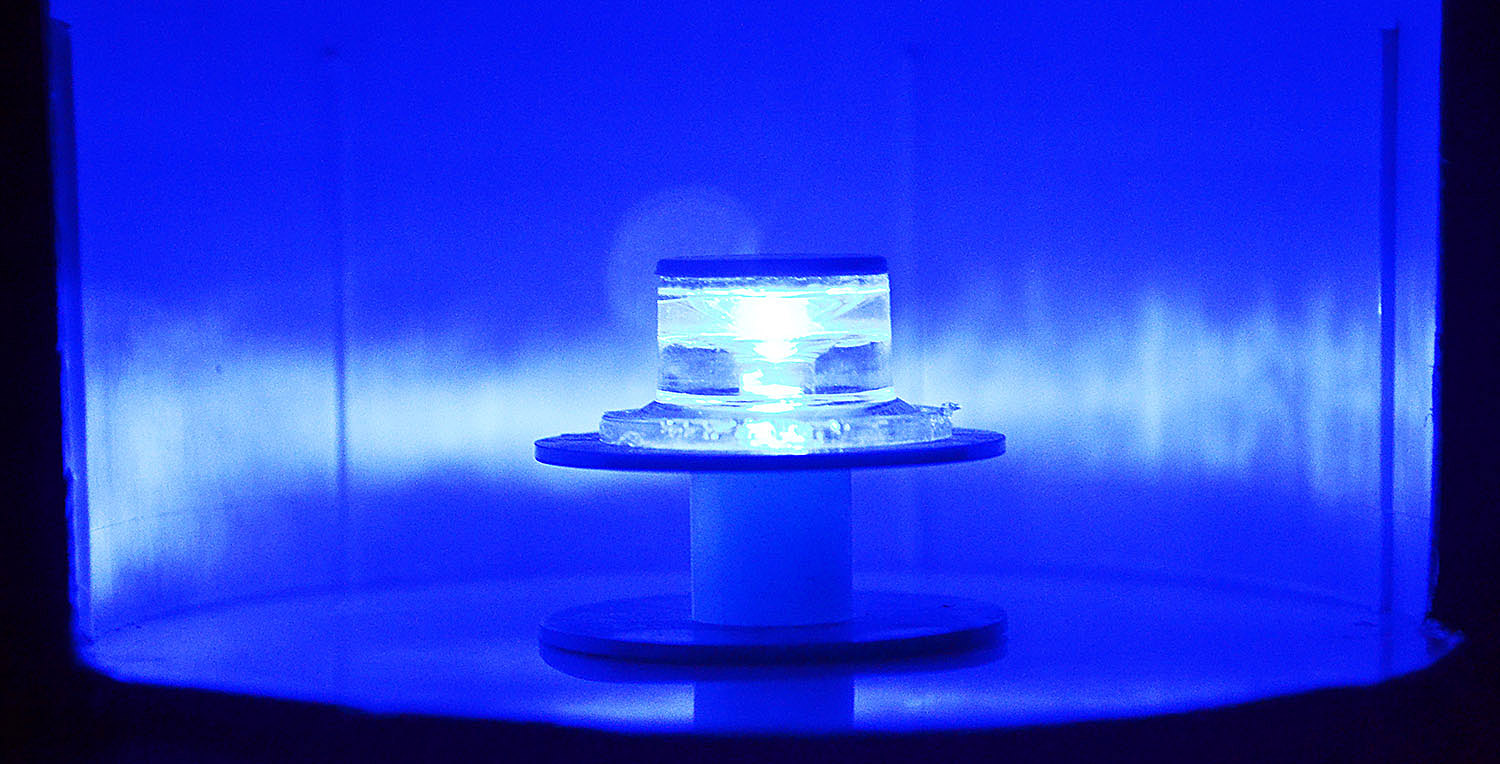
Using a visible light LED instead of the IR one we can see how the light is irradiated 360°.
Automatic charging system