This is a typical example of the difference between an amateur robot and a commercial one. The hobbyist builds his prototypes using standard components found off-the-shelf. A company that sells thousands of devices can afford the expenses of custom made parts optimizing the size and the maintenance off the appliance.
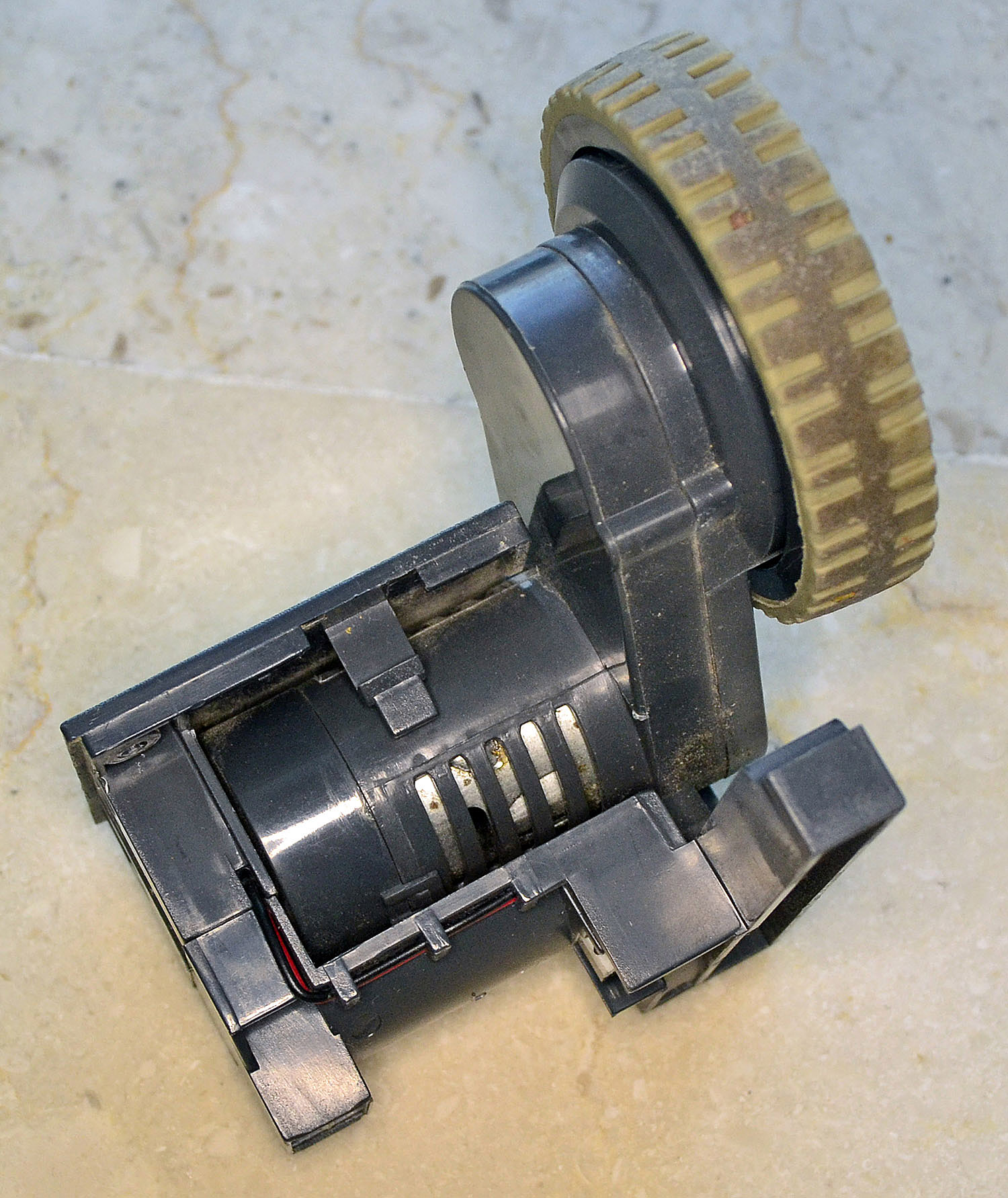
With an ad-hoc design, in a single and easily removable block can be integrated the motor, the reduction gears, the damping system and also the safety switch.
The motor is firmly tightened in the motion block and is the main part around which everything else is designed. In the bottom part is clearly visible the plug that connects the motor and the sensor to the main board.
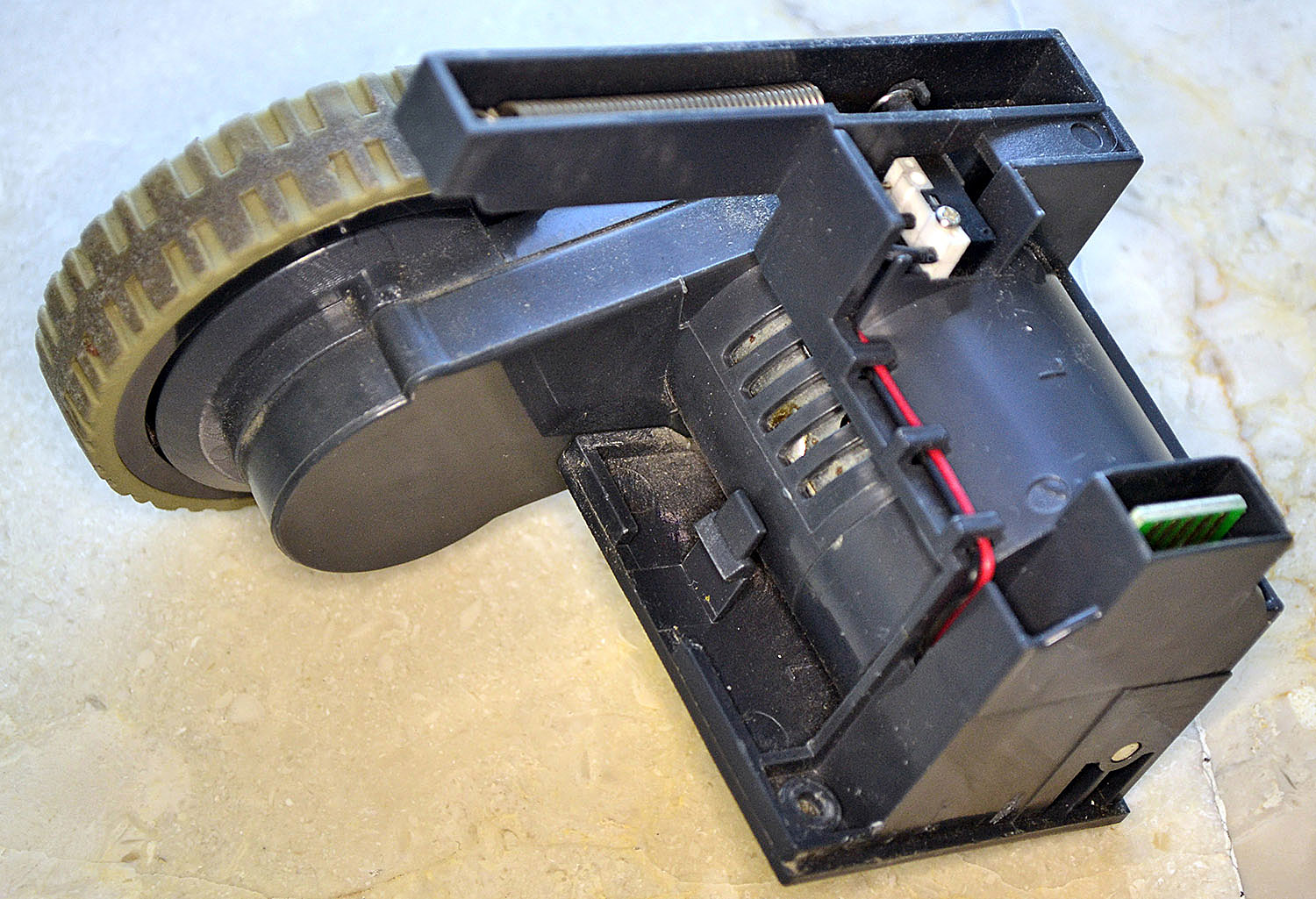
The wheel support is used also to fit the reduction mechanism (gear train) calculated to obtain the right speed and torque for the robot matching the motor speed (RPM) and the wheels diameter.
If you want to know how to choose the right combination of motor, gears and wheels for a robot,
here there is a very good tutorial and also a link to an on-line calculator that computes all the values.
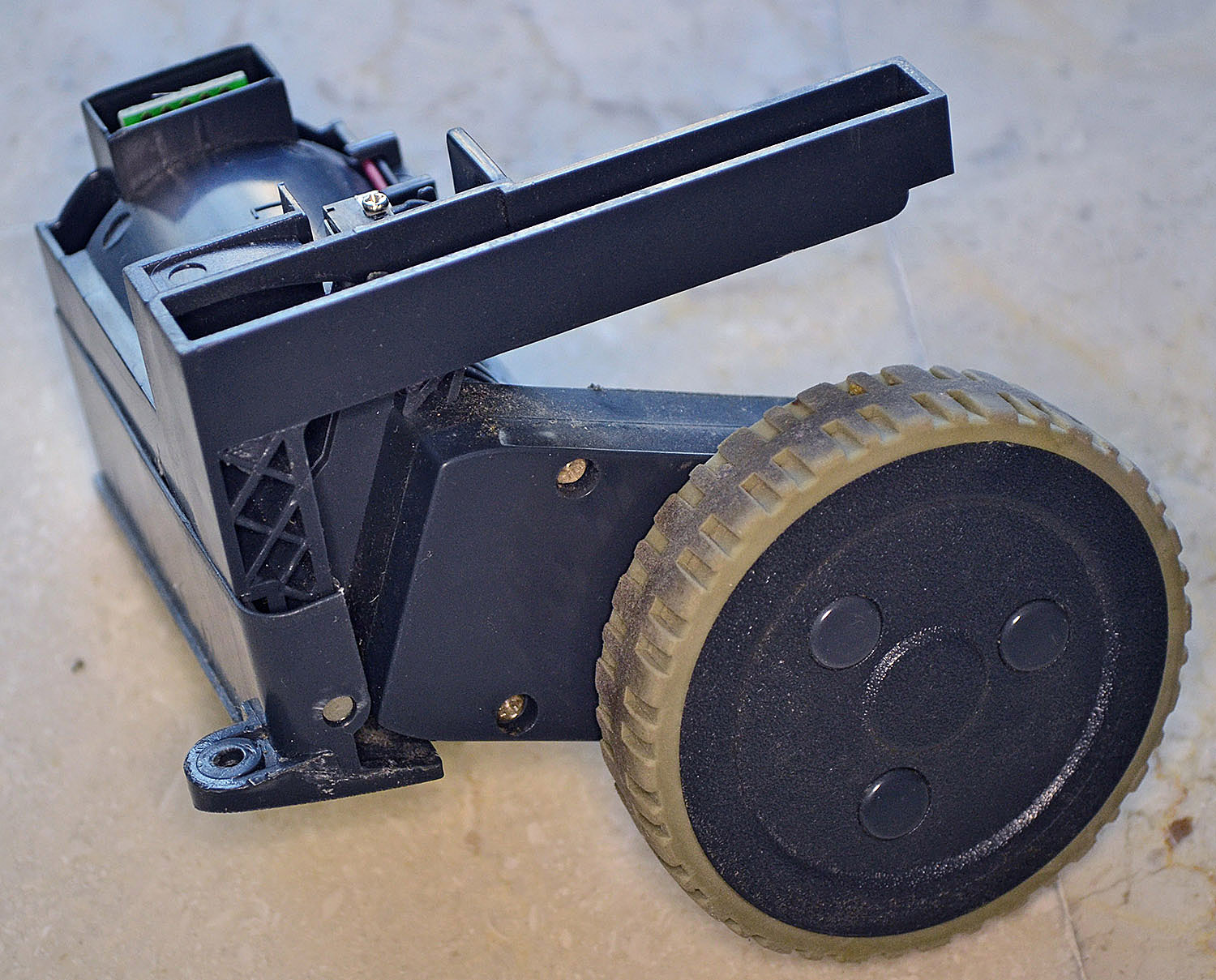
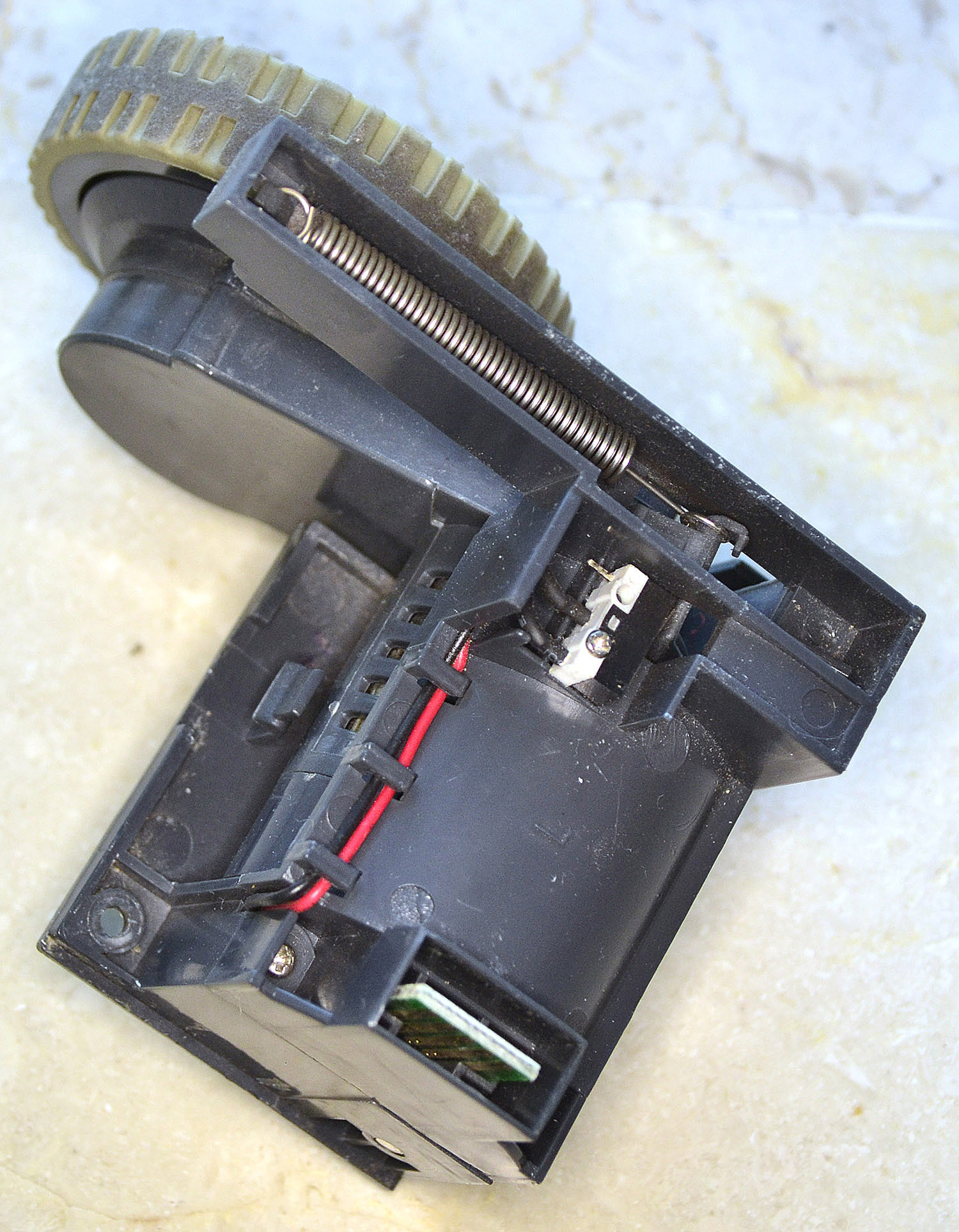
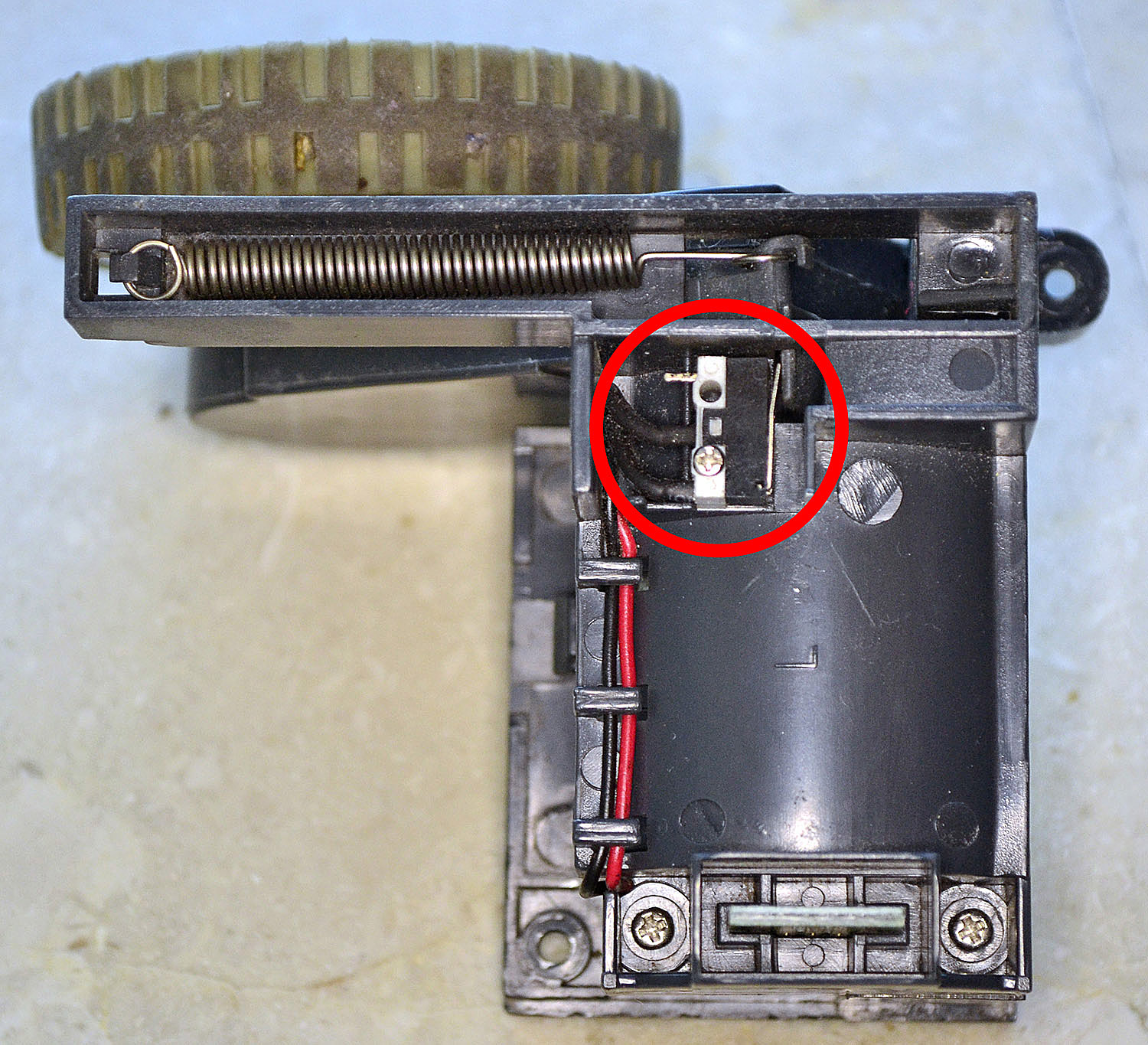
The same structure acts as a damping system too. The arm pivots on the fulcrum (the motor) giving to the robot a good way to adapt itself to the different kinds of floor. The spring balances the weight of the robot giving to it the adaptability needed.
Using the combination of leverage, spring and a micro-switch, a very good safety system is realized. When the robot is lift up from the floor, without the weight of the robot, the spring pulls the arm and activates the micro-switch. This immediately stops the robot in order to avoid damages to itself or to humans.