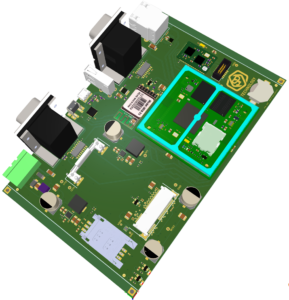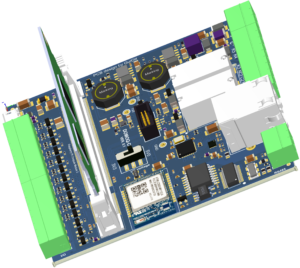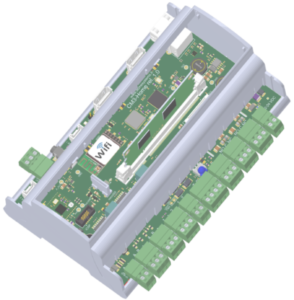
CM3 - HOME
CM3-Home OpenHAB edition is a ready-to-use DIN rail home & building automation controller based on Raspberry Pi 3 industrial module and OpenHab software
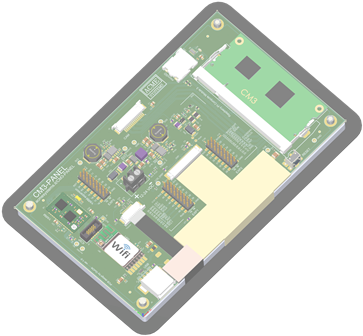
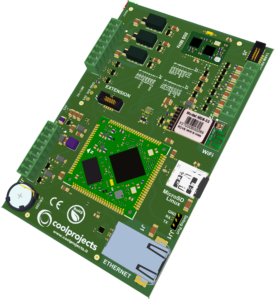
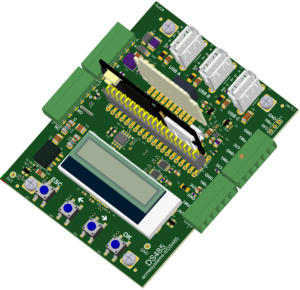
CM3 - PANEL
7" terminal for Raspberry Pi Compute Module 3, a thin panel PC based on Raspberry Pi 3 lite industrial module thought to be integrated on the front panel of your devices