Evoluzioni di Dino
E' passato un po' di tempo.
La scheda di controllo, la scheda sensori e la scheda di collegamento dei sensori sono montate, funzionanti e interconnesse.
Il bot si muove, e interagisce con l'esterno.

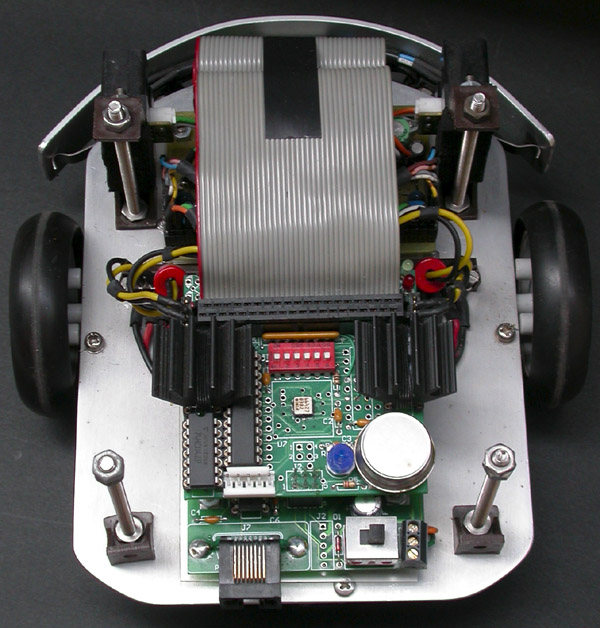
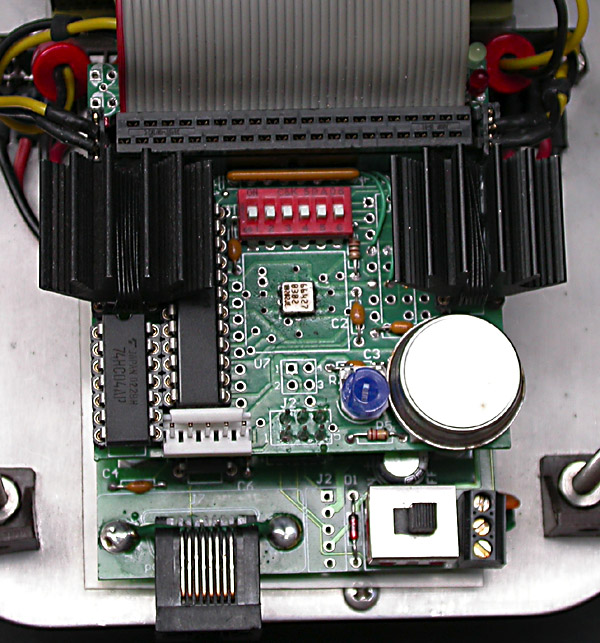
Le schede controllo e sensori sono collegate direttamente tramite i connettori a pettine. Sullo stesso bus è connessa la scheda di collegamento dei sensori tramite il cavo flat.
La parte di cavo flat arrotolata sul davanti servirà per collegare il bus ad altre schede.
Il cicalino originale è stato sostituito con uno autooscillante, si può pilotare direttamente con un pin I/O del PIC senza bisogno di routine particolari.
Evoluzioni Ulteriori