dsNav communication
Main panel
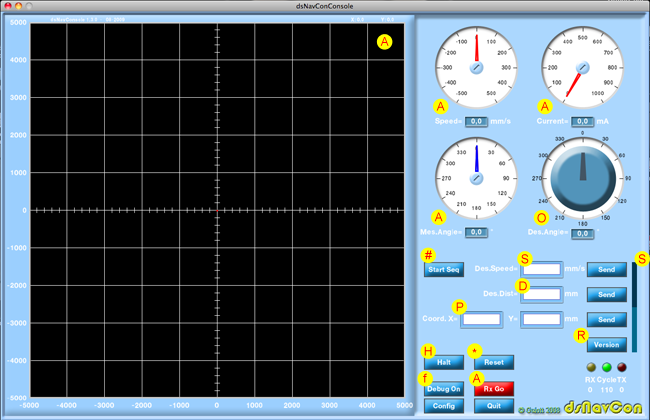
This is the first panel that appears when the console program is launched and it's the mostly used.
The letters inside the circle indicates the command as previously described.
A All mean parameters request
After pressing "Rx Go" button, and only if the PC communication port is correctly configured, the command is sent periodically from console program to dsNav board at every blink of the green led, with cycle time shown below it (in ms). Pressing again this button the cycle stops.
The dsNav replays with the requested values:
Vmean: mean speed. Shown on "Speed" gauge
Ctotal: current shown on "Current" gauge
PosX, PosY: plotted as a graph
Theta: estimated orientation angle. Shown on "Mes.Angle" gauge with red needle. The blu needle optionally shows the angle as measured by digital compass and received by optional sensors board.
IdlePerc: idle time of the MCU. Shown as a percentage under the yellow led.
O Sets the reference orientation angle in degrees (absolute)
As the desired angle varies on rotating the knob, this new value is sent to the dsNav.
# Start scheduler sequence
Pushing this button starts the sequence of actions previously sent to the dsNav with ÒSequencerÓ panel.
S Reference speed setting in mm/s
The desired traveling speed for the robot may be sent writing down the value (in mm/s) in the input field or moving with the mouse the slider. This value can be both positive or negative, meaning traveling backward. The robot approaches the desired speed with an accelerating (or decelerating) ramp and maintains that speed unless an obstacle is found if optional sensors board is present.
D Setting reference coordinates X, Y computing distance (Mode C)
The robot navigates for the distance written in the input field (in mm) starting from current coordinates and with the current orientation.
P Setting reference coordinates X, Y in mm (Mode B)
The robot navigates toward the point with coordinates written in these input fields.
R Software firmware version request
Pushing this button the command is sent and dsNav replays with a string containing its firmware version information. This string is displayed besides the button.
H Immediate Halt of both motors without decelerating ramp
This is useful for emergency stopping the robot immediately. It is not healthy for the motors and gears, especially for heavy robots. Use it carefully.
* Board software reset
Useful to remotely restarts the dsNav. For security reason, this command has to be sent three times consecutively in order to perform reset. After the reset the robot sets a new reference system using the current position and orientation.
f set "Console Debug" mode
JUST FOR DEBUG, in order to test the communication between console and dsNav and right decoding and encoding of received and transmitted packets, also if motors and encoders are not connected.
The dsNav firmware acts as a loopback, sending back to the console some values proportional to other received values.
The "Config" button allows the switch to the configuration panel. The "Quit" button stops the program.
The RX yellow led flashes at every packet received from the dsNav.
The Cycle green led flashes when an automatic parameters request is periodically sent to dsNav.
The TX red led flashes when commands are manually sent with buttons or knob.
The number below this led shows how many communication errors occurred since the program was launched. A description of the last error occurred is displayed to the left.