
dsNav
The navigation system is split in two parts, the front dsNav is the master one. It exchanges information with the IMU and decides the speed for front-right and front-left wheels to go in the right direction for the right distance.
Then it sends those values to the back dsNav, the slave one, in order to maintain perfectly paired
the wheels on each side, i.e.: the back-right wheel always spins at the same speed of the front-right one, as well as the back-left and front-left wheels.

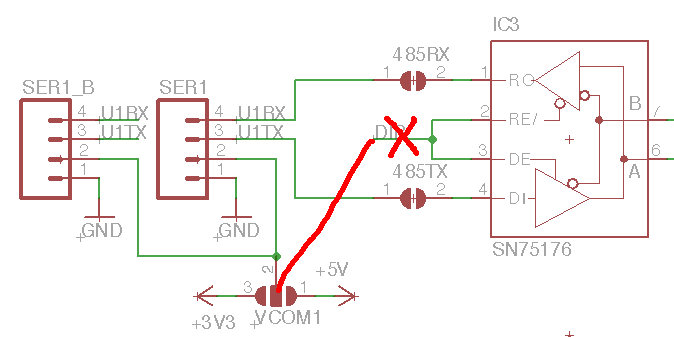
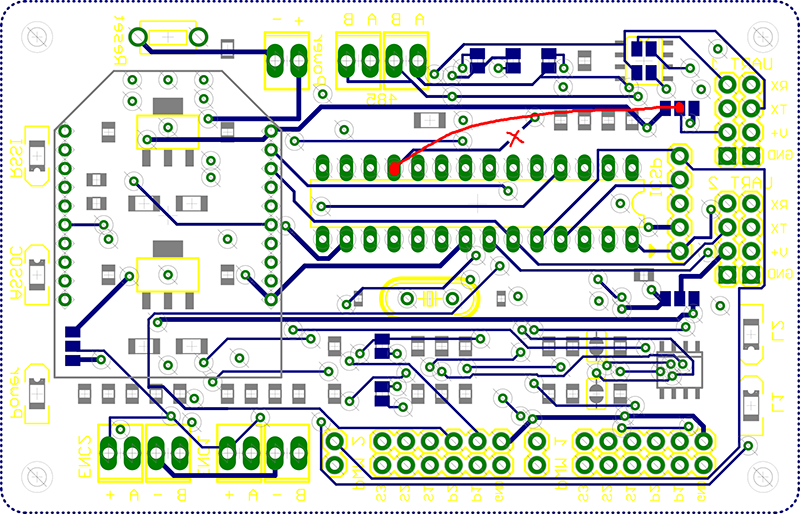
The modification needs just a cut to the original track and a wire soldered between to existing pads.
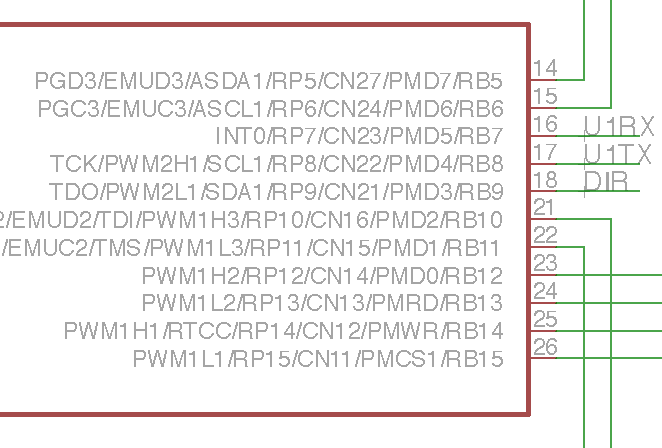
If the pins are used for UART1, use pin 1for GND, pin 3 for TX and pin 4 for RX. For I2C, use pin 1 for GND, pin 2 for SDA and pin 3 for SCL.
Of course the Vcom features of the original circuit cannot be used anymore.
The whole MPLAB X project
of the software containing I2C procedures for dsPIC33
is available as an open source at
Google code repository